如果沒有要移除的顯著材料,建議將素材設定為與零件相同的幾何圖形。為此,請複製零件並將其指定為素材。
使用 啟用碰撞檢查 運行模擬。如果發生碰撞,可以使用多個選項來避免碰撞:
-
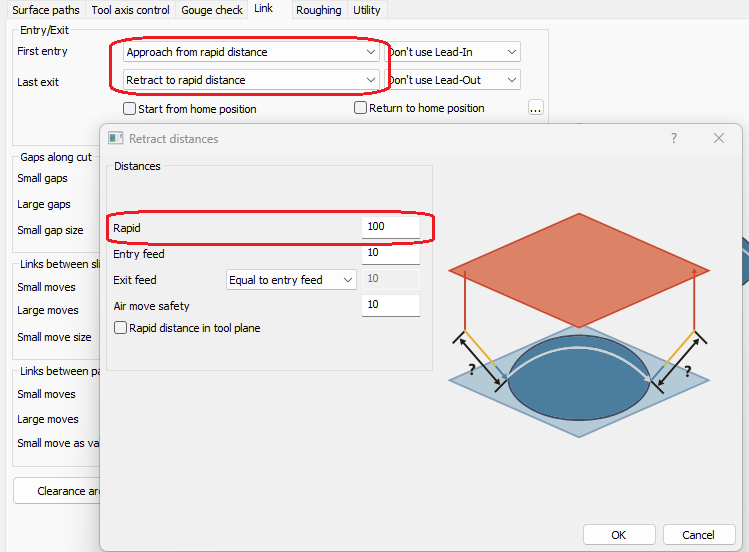
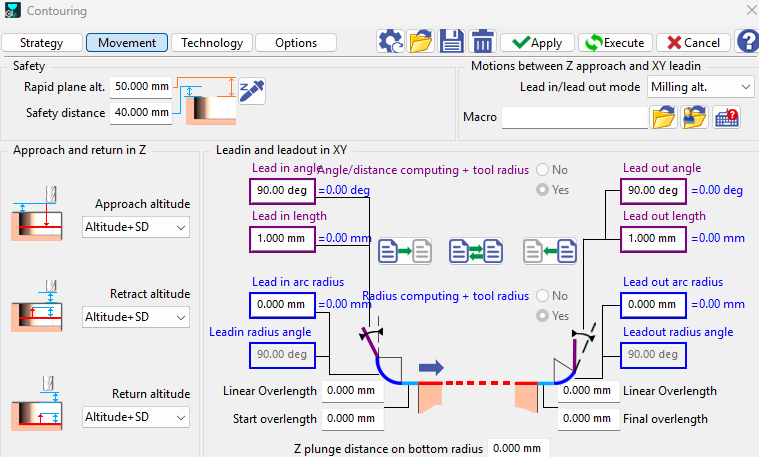
如果碰撞發生在循環的逼近或返回點:
-
重置逼近/返回參數(例如,距離)。
-
新增額外的逼近/返回點。
-
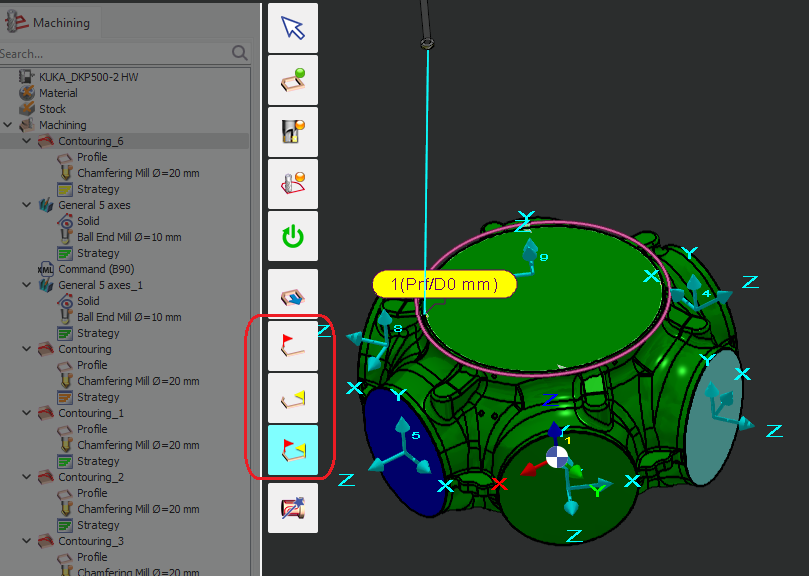
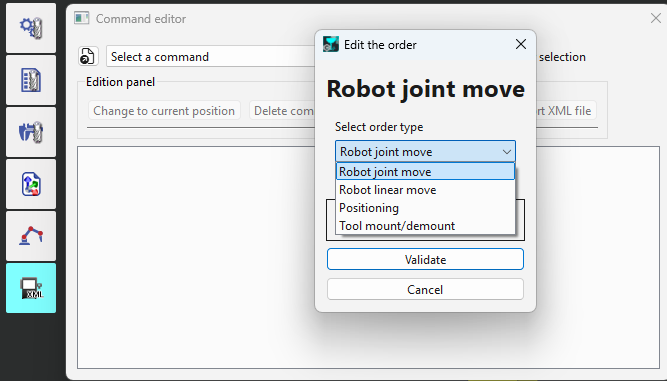
Create and insert a 機台指令 move before or after the cycle.
-
除非必要,否則不要使用機器人線性移動 ,以避免奇點的風險。
-
建議: 偏好方法 a 或 b ,因為它們修改了循環本身,然後可以將其重複用於其他機器人(例如,在 Opelist 中)。
-
-
若要使非機器人軸可供機台指令選取 定位 ,則必須將其定義為 可程式設計 .
不建議在 GO2Robot 中使用 移動元件 。首先,單個移動元件指令僅移動一個軸;要移動 6 軸機器人,您需要六個單獨的移動元件指令,並且移動將不同步。其次,輸出機器人的 CN 檔案是不合適的。相反,使用 機台指令 ,它可以同時移動多個軸。
-
對於其他情況:
-
更改循環的機器人策略。
-
修改機器人參考位置。
-
重新定位機器人或零件以測試新的機器人路徑。
-
…
-