A basic workflow to program a robot in GO2CAM is as such:
機器人模組
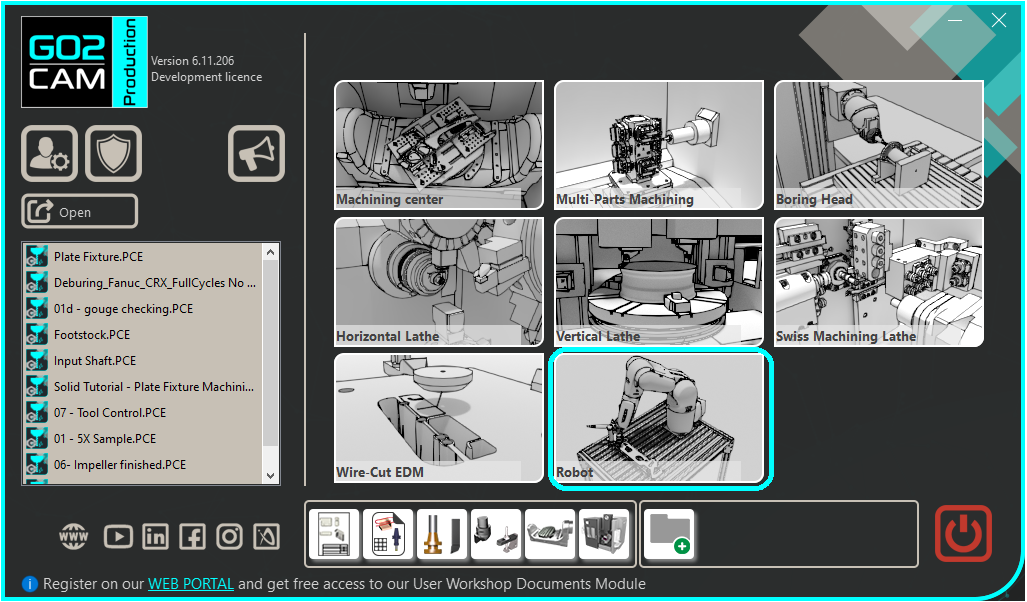
機器人介面可能看起來與 MTE 環境相似,但它是一個獨立的模組。 如果您購買了該套件,則可以從主頁面取得,機器人檔案只能在此模組中開啟。 |
|
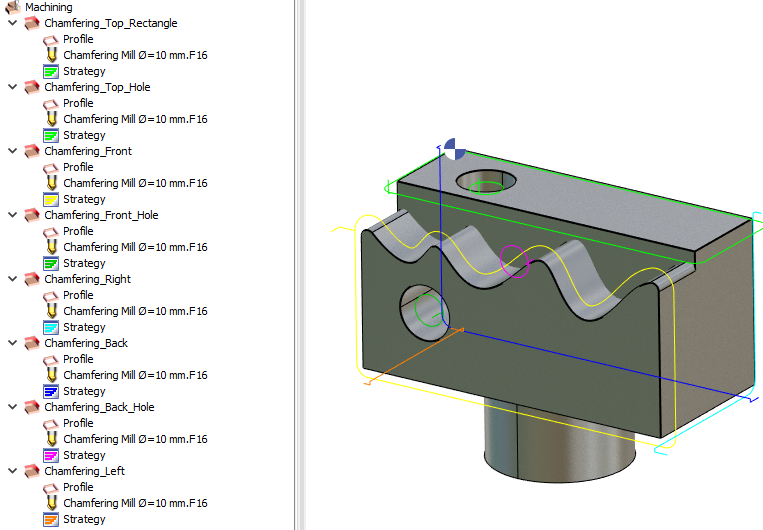
零件的 CAM 編程此過程的這一部分與機械加工中心模組中的編程類似。 導入零件。 像往常一樣定義循環;幾何圖形選擇、刀具選擇和循環選擇。 機器人被視為銑床,因此任何銑削循環都可用於機器人加工,從標準的 3X 到高級的 5X。 計算並模擬刀具的運動。 可以在幾何圖形選擇過程中定義多個逼近點和退回點,以手動控制逼近和退回刀具路徑與零件。 |
|
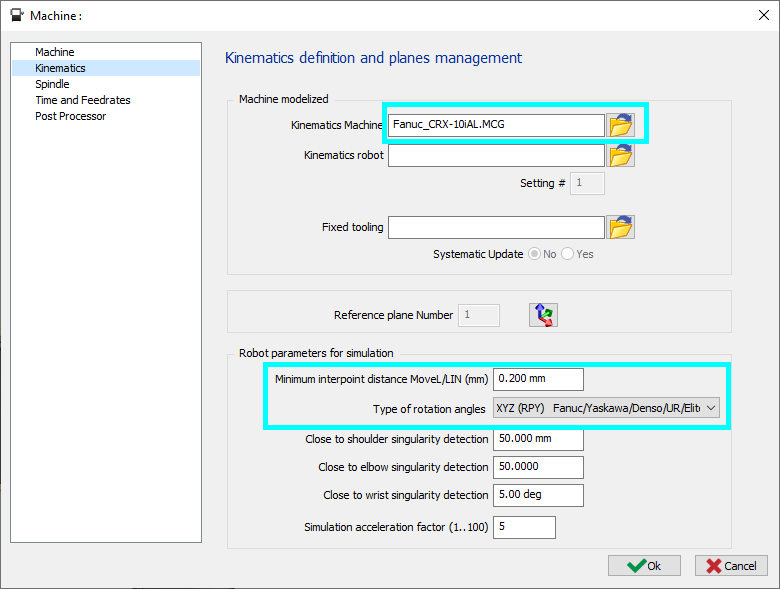
機器人配置機器人運動學 創建一個或多個循環並計算且沒有錯誤後,選擇一個機器人,該機器人將驅動所選刀具以執行加工循環。 在加工樹中,右鍵單擊機器,然後選擇編輯。 將打開機器對話框。 為運動學機器選擇一個 .MCG 檔案,定義參數,然後單擊確定進行驗證。 如果要定義機器人單元,則需要設置 2 個 .MCG 檔案。 運動學機器人應該是一個獨立的機器人,而運動學機器可以是單元的其他部分。 在這種情況下,無法點動機器人的軸位置。 建議僅使用一個 MCG,以便完全訪問所有機器人的組件。 最小點間距離 MoveL/LIN (mm) :這是機器人程式生成的線性運動的最小距離,這對於曲線路徑很有用,而無需高精度,通過使用更少的點使路徑運動更快(模擬不會受到此參數的影響)。 旋轉角度的類型 可以根據所使用的機器人製造商進行設置。 閾值 可以設置值 奇點檢測 肩部、肘部和腕部關節。 可以通過進入「機台」選單並選擇「刀具」子選單來將機器人與零件一起可視化。 機器人可能會被隱藏,方法是在樹中用滑鼠中鍵單擊機器人名稱。如果零件被機器人本體隱藏,這很有用。 |
|
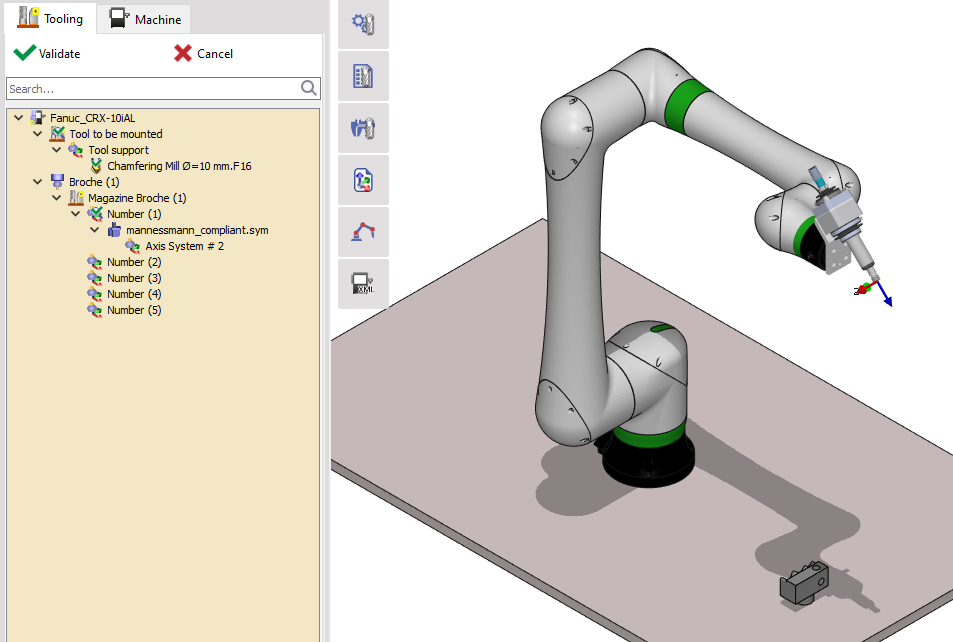
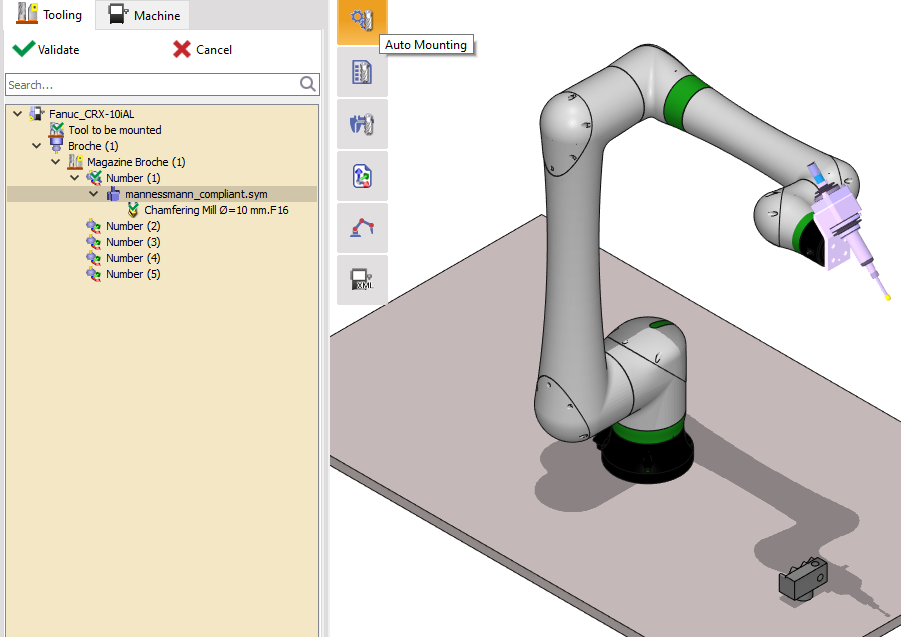
刀具和零件配置載入刀具和刀架的過程與 MTE 類似。 點擊自動裝配將刀具安裝到機器人上。 右鍵點擊刀具或機器人末端軸以插入刀架。 刀具可以在刀具選項卡中進一步配置,零件可以在機台選項卡中重新定位。
|
|
|
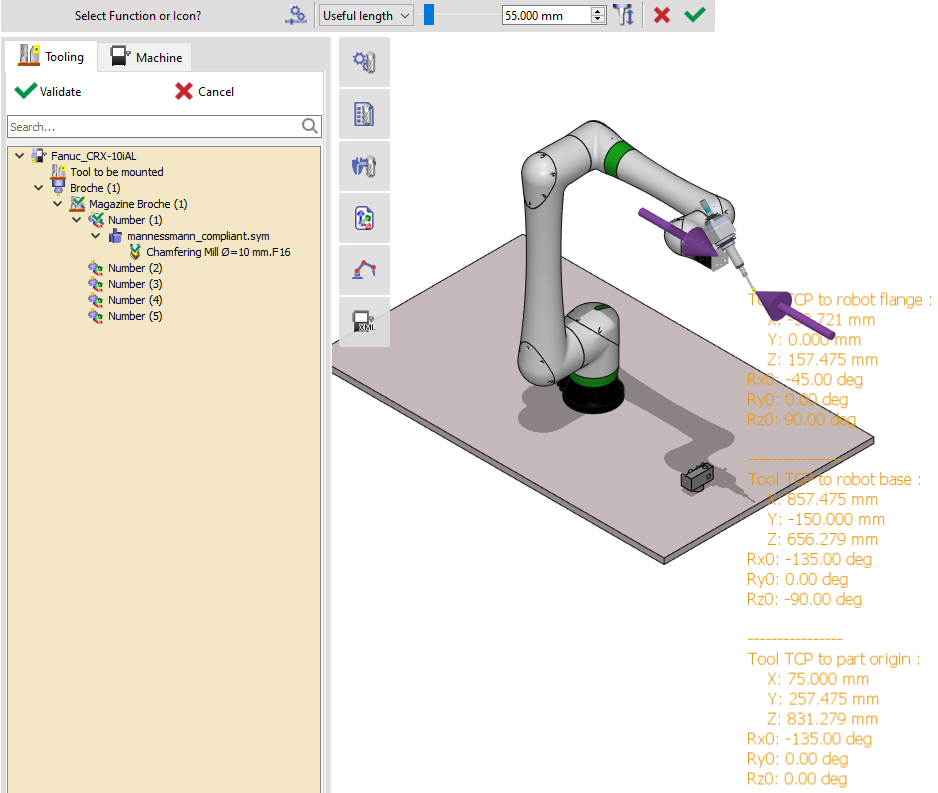
刀具 通過雙擊樹狀結構或程式視窗中的刀具,將顯示相對於機器人法蘭的刀具中心點 (TCP),您也可以在上方功能區上修改刀具伸出長。
TCP 以 X、Y、Z、Rx0、Ry0、Rz0 表示。
|
|
|
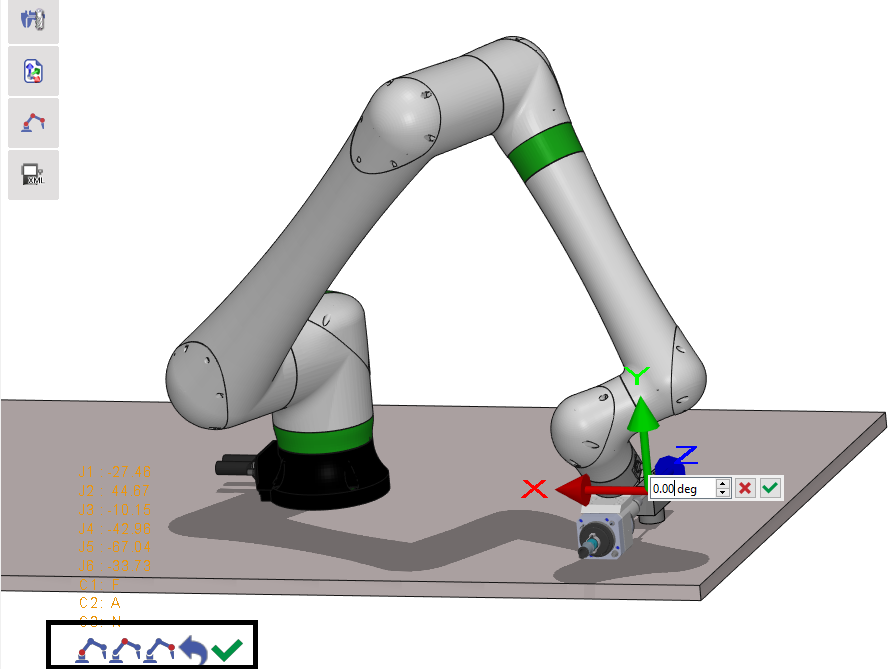
零件可達性 最初,零件的位置可能離機器人太近或太遠。 可以估計機器人對零件的可達性。 在 刀具 tab,雙擊零件上的點,如果該點可到達,機器人將移動以使其工具或其法蘭點垂直於該點,否則將顯示一條消息。 要顯示刀具框架軸並移動刀具,請雙擊機器人,然後通過單擊它來選擇刀具(一個機器人可以同時有多個刀具)。 在保持相同刀具位置的同時,使用左下角的三個圖標更改機器人配置。 也可以通過左鍵單擊並拖動軸箭頭進行平移和旋轉來移動框架,或者右鍵單擊軸以指定平移或旋轉值。 |
|
|
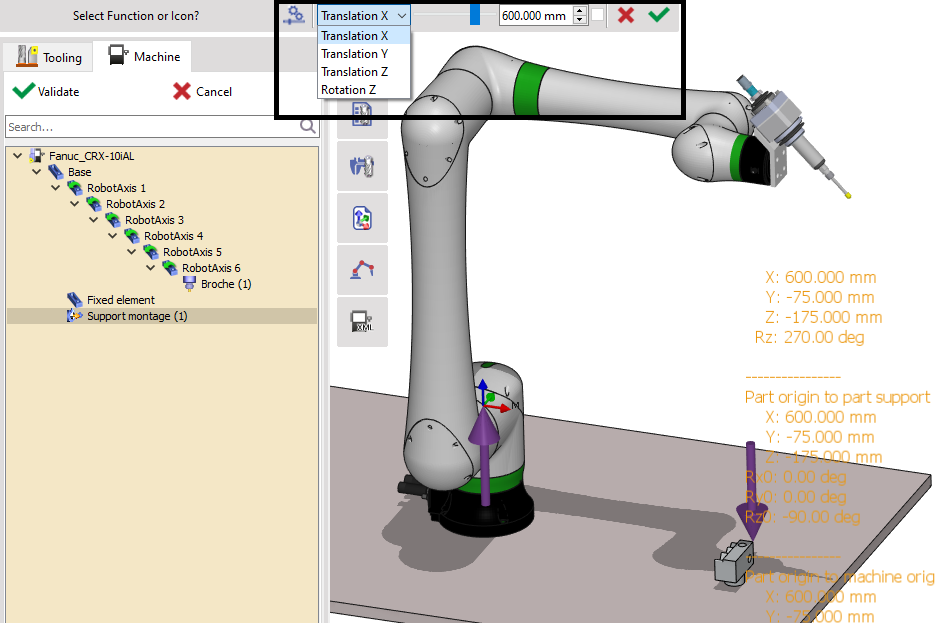
零件重新定位 可以相對於機器人重新定位零件。 切換到機台選項卡,雙擊工件裝配件支撐(在此範例中重新命名為 Support montage)。零件的笛卡爾位置將在機器人的基座框架中可見 沿 X、Y、Z 方向重新定位零件,並僅使用功能區上的功能繞 Z 軸旋轉 驗證修改。
|
|
|
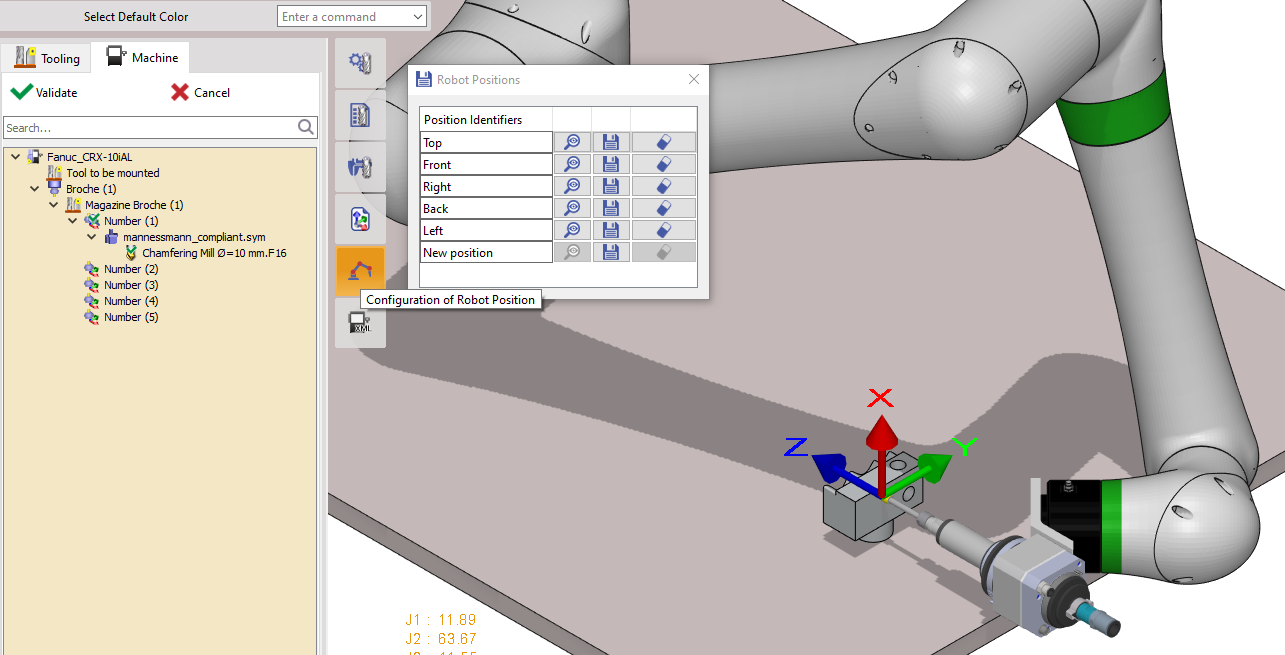
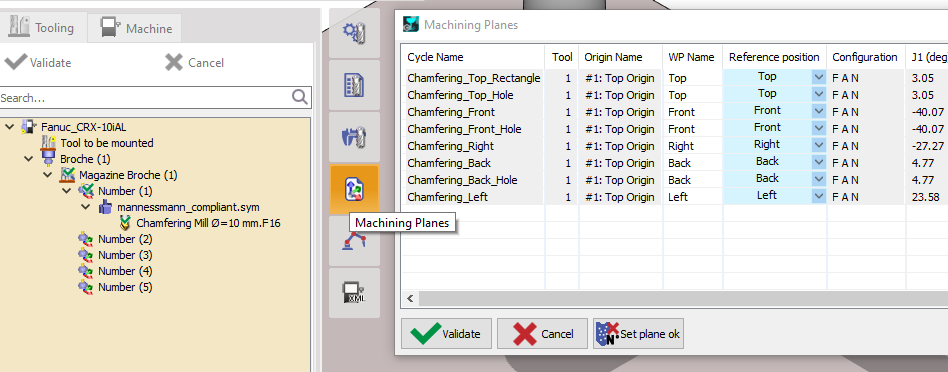
每個循環的參考位置 由於通過笛卡爾點定位機器人是多餘的,因此一個平面上的一個循環的配置或方向可能不適用於另一個平面上的另一個循環,最好為每個循環定義一個參考位置。 事實上,要生成每個循環的關節位置路徑,需要一個參考位置。 在此循環的整個路徑中,保持參考位置的相同配置並參考方向。 如果您想了解更多信息,請點擊此處: 機器人參考位置建立 . 要新增或修改現有的參考位置,請點擊左側工具欄上的手臂組態的位置指令。 基於平面將機器人定位到曲面。 通過拖動刀具 TCP 軸來更改方向,以在曲面上實現機器人的適當定位 使用相應平面的保存圖標保存配置。 一旦所有必要的參考位置被建立和保存,它們需要與已定義的循環關聯。為此,打開機械加工平面命令,並為每個循環分配參考位置。 如果沒有為循環分配參考位置,則將採用前一個循環的最後一個參考位置。如果第一個循環的參考位置未關聯,則採用在運動鏈文件(.MCG)中定義的起始機器人關節位置。 因此,如果沒有一個循環被分配了參考位置,則將為所有這些循環應用起始機器人關節位置。 |
|
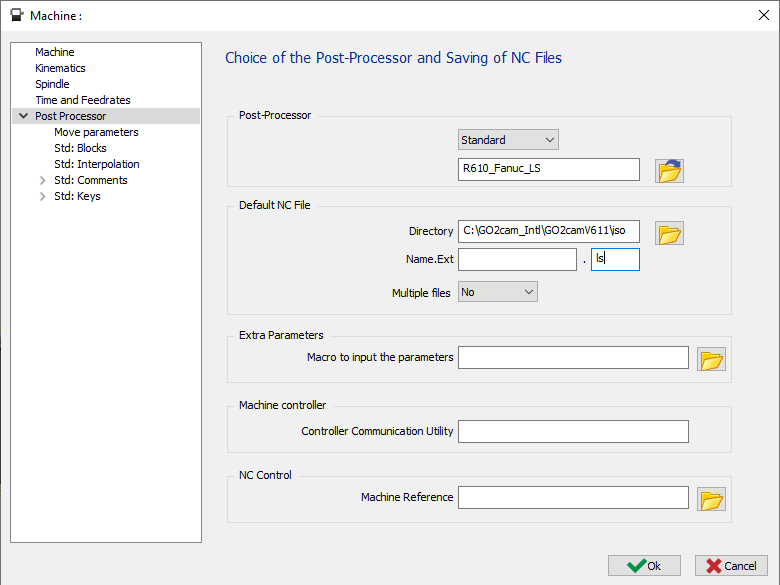
後處理器選擇與 MTE 類似,對於使用機器人和程序生成的模擬,需要選擇一個後處理器。 在加工歴程樹中,再次打開機台窗口,然後轉到後處理器菜單。 保持PP類型為標準的,然後為機器人選擇正確的PP。 在這種情況下,它是一個FANUC機器人,因此選擇R610_Fanuc_LS。 如果需要,也可以指定輸出程序名稱(名稱。EXT)和擴展名。 |
|
機器人策略設置在模擬制造之前,我們需要設置機器人策略,以便將刀具路徑轉換為機器人運動路徑。 點擊這裡: 機器人策略設置 |
|
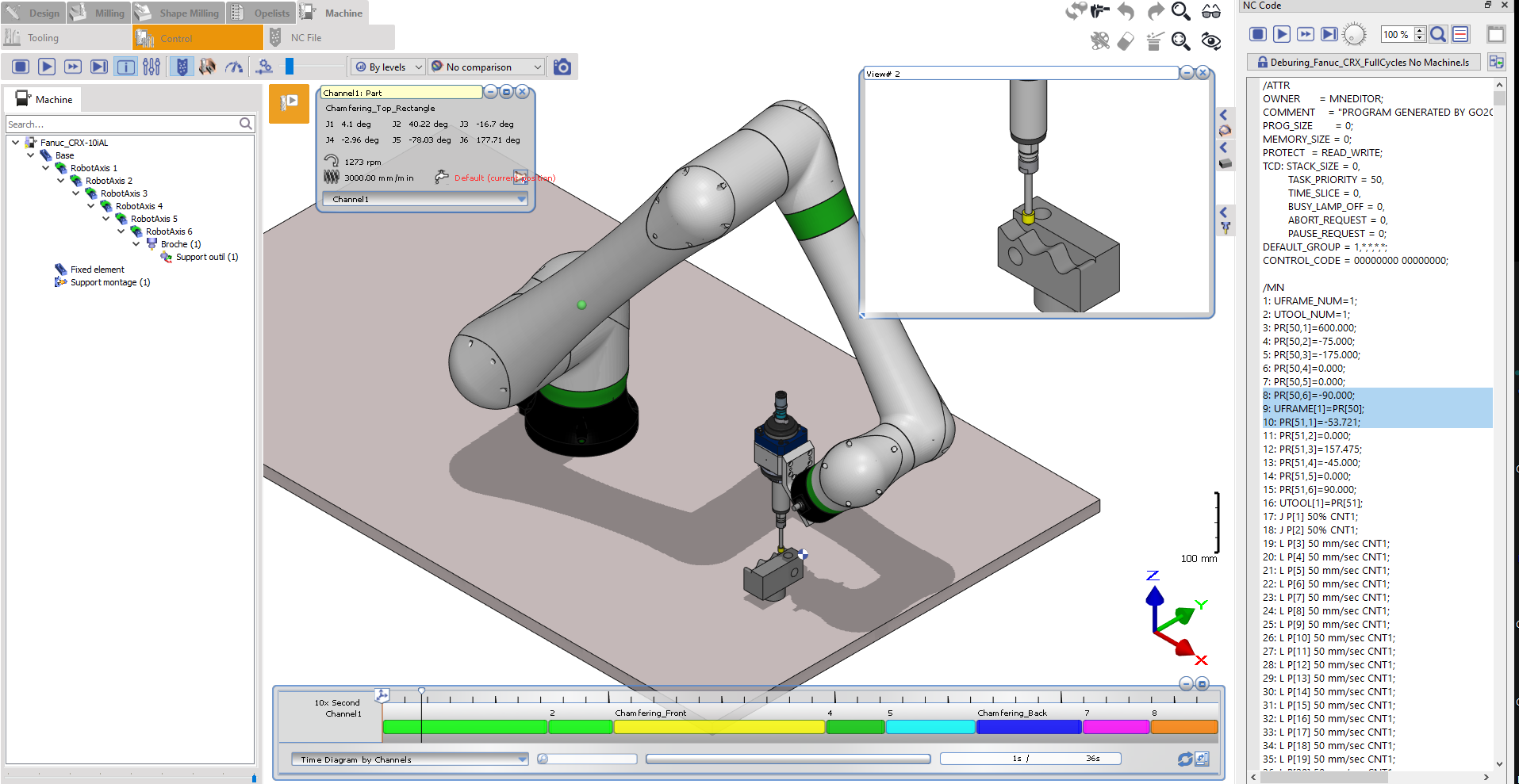
模擬在定義了加工循環,選擇了機器人,配置了刀具和零件,並選擇了後處理器之後,可以在「控制」選單中啟動帶有機器人的模擬。 此時,參數和模擬環境與 MTE 相同。 |
|
碰撞避免如果沒有要移除的材料,建議將素材設置為與零件相同的幾何圖形。為此,請複製零件並將其指定為素材。 運行模擬 碰撞檢查已啟用 . 檢查這裡有幾個選項可以避免碰撞: 碰撞避免 . |
|
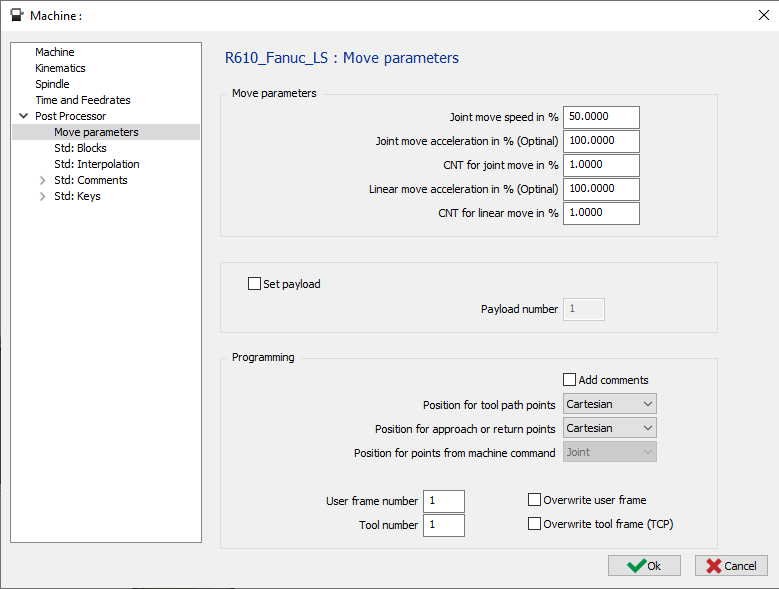
機器人程式輸出機器人程式參數設定 在產生機器人程式之前,需要指定幾個參數。 關節移動速度(%),關節移動加速度(%)(可選),關節移動的 CNT(%),線性移動加速度(%)(可選),線性移動的 CNT(%)可以在後處理器的移動參數子選單下的機器參數視窗中配置。 可以在笛卡爾和關節之間選擇刀具路徑和進刀和退刀點的有效載荷和定位。 |
|
|
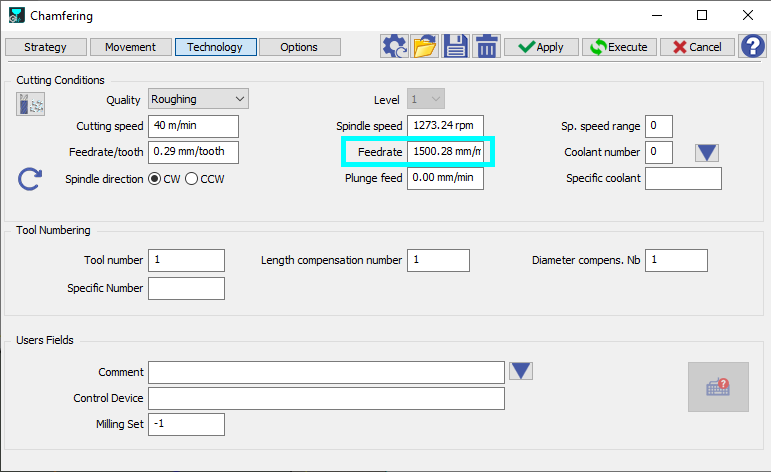
機器人線性速度設定 固定切削線速 技術 tab. The 進給 局限於參數 mm/min 無法翻譯此句子,因為字典中沒有對應的翻譯。 任何修改應該通過點擊應用 執行 視圖改變 |
|
|
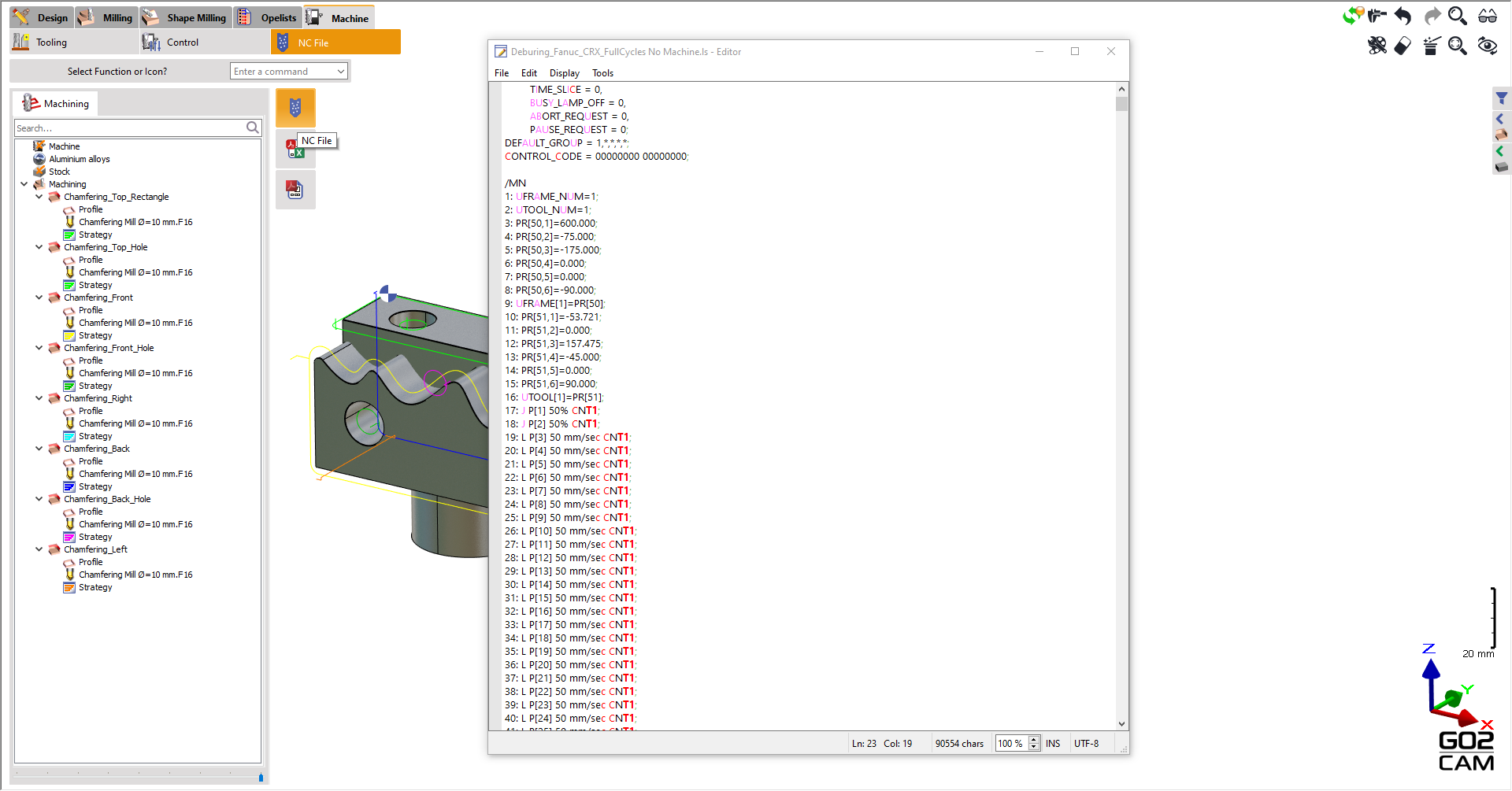
出NC碼 生成NC文件通過點擊NC文件子菜單中的NC文件指令。 |
|
|
輪廓線到右方
|
|

機器人 控制器
|
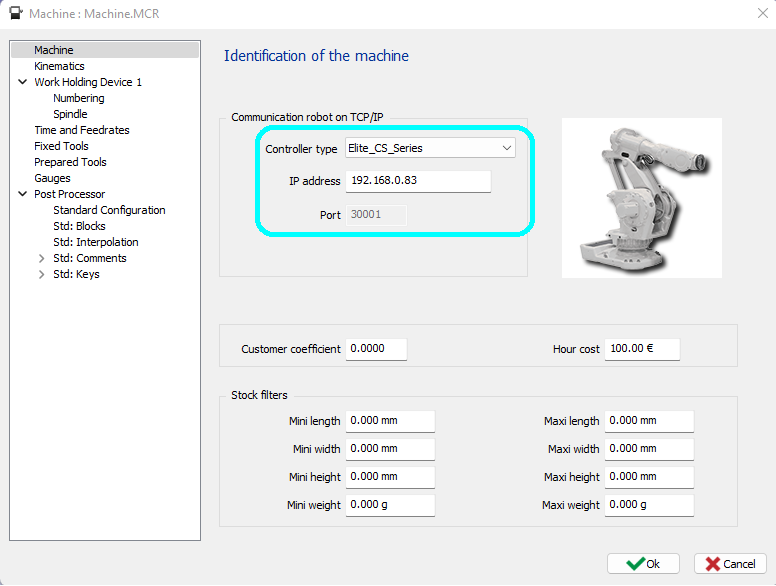
機器人 控制器 連接 設置 輸出程式然後可以在機器人模擬器或真實機器人上執行。 建議在模擬器中運行程式以驗證它。 對於多個機器人,可以通過IP/TCP或模擬器連接到機器人控制器,並在程序運行時同步機器人運動,為此,請轉到機器設置窗口,選擇機器人控制器類型,輸入IP地址和端口號。 右側聯接點 是一個例子。 |
|
|
在GO2cam中同步,同時機器人程序正在運行 如果一個真實的機器人或其模擬器正在運行一個程序,實時的真實位置可以在GO2CAM中同步(實際上並非所有機器人都支持)。要開始同步,請轉到刀具,然後在左下角選擇開始同步圖標。 確保選擇正確的刀具以繪製正確的刀具路徑。 根據控制器,我們甚至可以獲得機器人 TCP 線性速度和點索引。 |
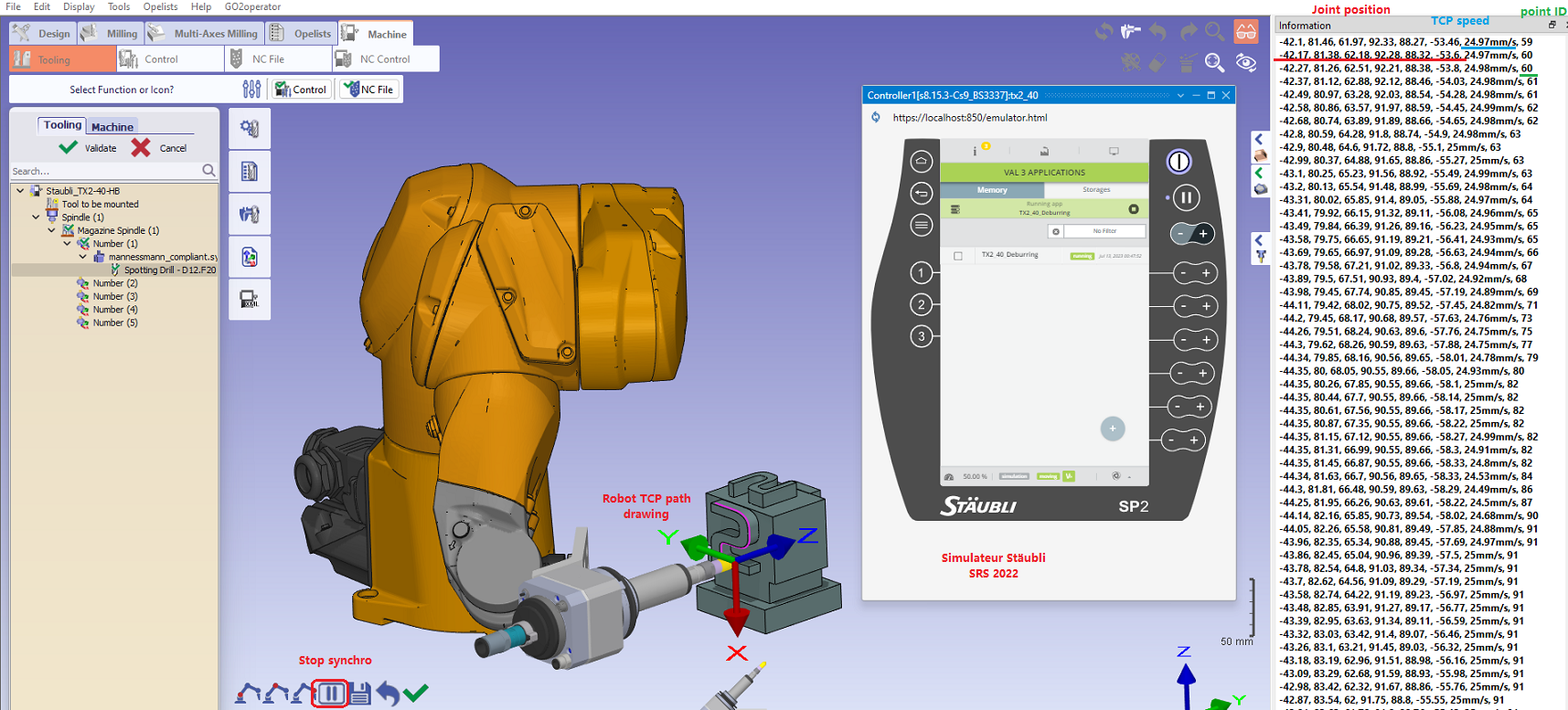
|