為何選擇機器人?
|
由於機器人技術的進步、生產品質的提高、機器效率的提高以及工業化的增加,全球 CAM 市場正在迅速增長。 機器人提供 24/7 全天候運作、卓越的重複性,精度通常低於 50 微米,並且隨著時間的推移,投資回報率 (ROI) 很高。 它們對於推進工業 4.0、機器學習和人工智慧至關重要,推動了各個行業的創新並提高了生產力。 |
機器人離線程式設計 (OLP)
|
傳統上,機器人是使用示教器(一種手持設備)進行示教的,該設備手動引導機器人完成任務。 這種方法可能很麻煩、有風險且耗時。 離線機器人程式設計 (OLP) 允許操作員使用數位 3D 模型遠端工作,以在將機器人路徑上傳到機器人之前生成和驗證機器人路徑。 這減少了手動示教,提高了安全性,並提高了效率。 ROP 的好處:
|

|
GO2cam 機器人的技術特點
|
GO2CAM 擁有實施 OLP 的所有基礎設施,並具有用於機器人運動學計算的強大數學引擎。 GO2CAM 的目標是將機器人程式設計的大部分難度保留在軟體中,並使機器人對客戶來說像銑床一樣易於使用。 GO2cam 中的 ROP 適用於: |
||
|
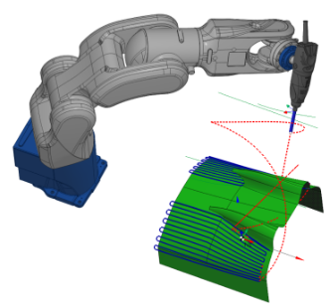
> 對於機器人預計要遵循連續路徑的任務,工作流程幾乎與機床相同
|
|
|
|
> 對於機器人只需要通過幾個航點的任務,使用互動式介面來規劃整個路徑
|

|
|
|
該軟體可以處理幾乎所有串列 6 軸機器人: |
|
|
|
類型 1: 大多數工業 6 軸機器人,其中最後 3 個軸在一個點上相交 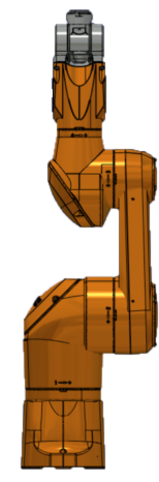
|
類型 2: 大多數協作機器人,其中第 2、3 和 4 軸平行 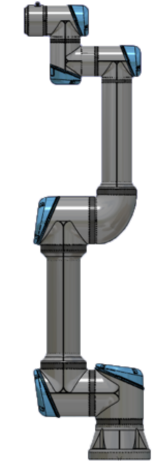
|
類型 3: 與類型 1 類似,除了最後三個軸不在一個點上相交(Fanuc CRX) 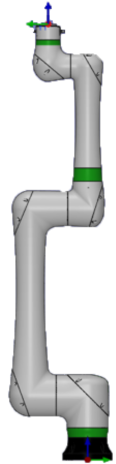
|
在 GO2cam 中對機器人進行程式設計的步驟主要如下:
-
零件的 CAM,可用於其他機器人單元。
-
機器人單元設計,可用於其他零件。
-
機器人加工策略設定
-
模擬和碰撞檢測
-
PP 和技術功能設定
-
機器人程式生成