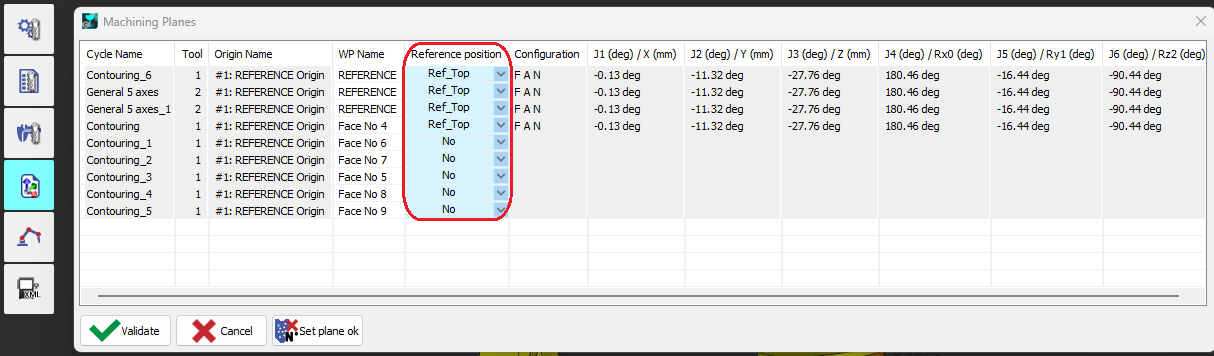
为了将具有部分未定义方向的刀具路径转换为没有歧义的机器人关节位置,需要一个 参考点 。 从中我们提取:
-
机器人参考配置 → 在整个循环中保持。
-
机器人参考关节角度 → 第一个生成的机器人位置将适合这些(以确定关节转弯,尤其是 J4 和 J6)。
-
参考 TCP 方向 → 用于定义导入刀具方向。
参考位置可以定义为:
-
关节格式(特定于机器人) → 通过正向运动学计算的刀具方向。
-
具有配置的笛卡尔格式(通用且可重复用于其他机械臂) → 通过逆运动学计算的关节位置。
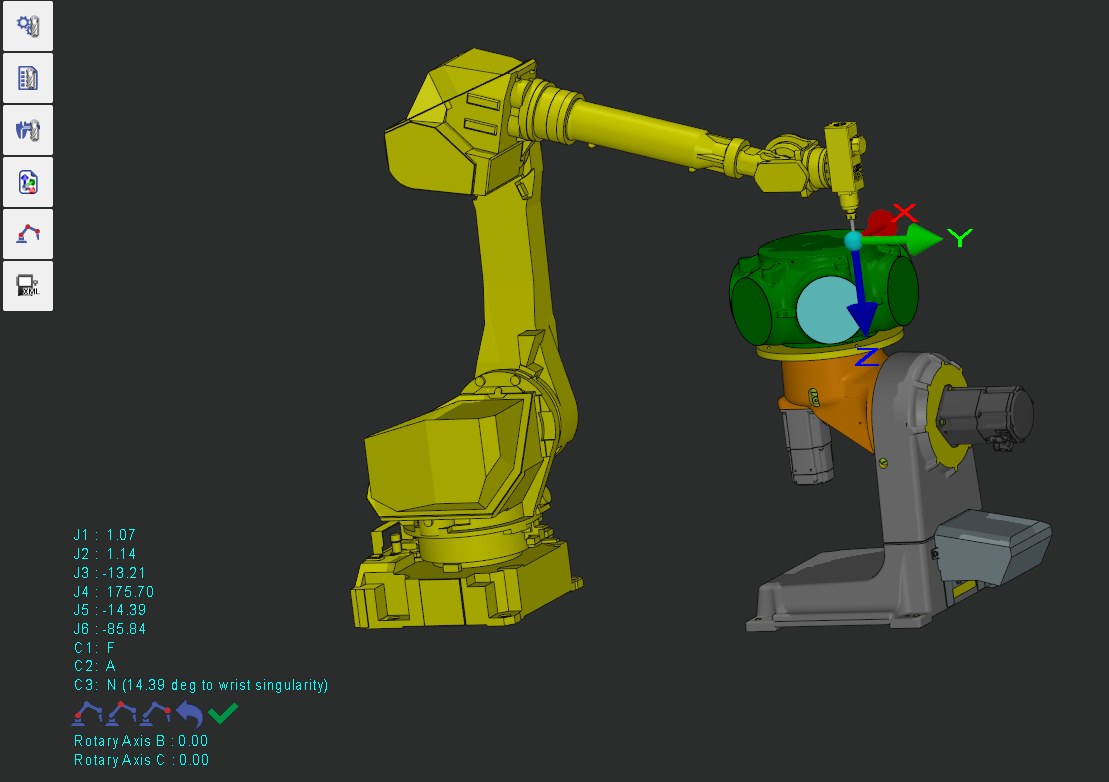
创建机器人参考位置
-
选择格式 (关节或笛卡尔)。

-
在 刀具 中,双击零件以定位机器人。
-
使用可用工具切换配置(肩-肘-腕),对齐刀具方向,平移(通过拖动或输入距离)或旋转(通过拖动或输入角度)。
-
-
命名并保存 参考位置。
-
分配 将创建的参考位置分配给加工操作(可选)。
-
如果未分配参考位置,将使用循环之前的机器人的当前位置。
-