This page refers to the robot strategy dialog in 版本 6.12.207.
召回 :
循环的刀具路径是预先计算的。对于刀具路径的每个点,提供以下数据:
-
点位置
-
Z轴方向(X轴和Y轴保持未定义)
6轴工业机器人与传统数控机床的区别
-
冗余配置:
肩部 2 个,肘部 2 个,腕部 2 个 → 总共 8 种可能的配置。 -
冗余转弯(尤其是在J4和J6上):
相同的笛卡尔路径可以用J6进入 [-180°, 180°] 或 [180°, 540°] . -
TCP(刀具中心点)的冗余方向:
6轴工业机器人提供完全定义的刀具方向。 如果 X 和 Y 轴未事先定义,则可能的方向是无限的。
需要参考位置
要将具有部分未定义方向的刀具路径转换为机器人关节位置而没有歧义,需要一个 参考位置 。 从中我们提取:
-
机器人参考配置 (在整个循环中保持)。
-
机器人参考关节角度 ,第一个生成的机器人位置将适合该角度(以确定关节转弯,尤其是J4和J6)。
-
参考TCP方向 ,用于定义导入刀具方向。
参考位置可以定义为:
-
关节格式(机器人专用)→ 通过正向运动学进行刀具定向,
-
带配置的笛卡尔格式(通用)→ 通过逆运动学进行关节位置。
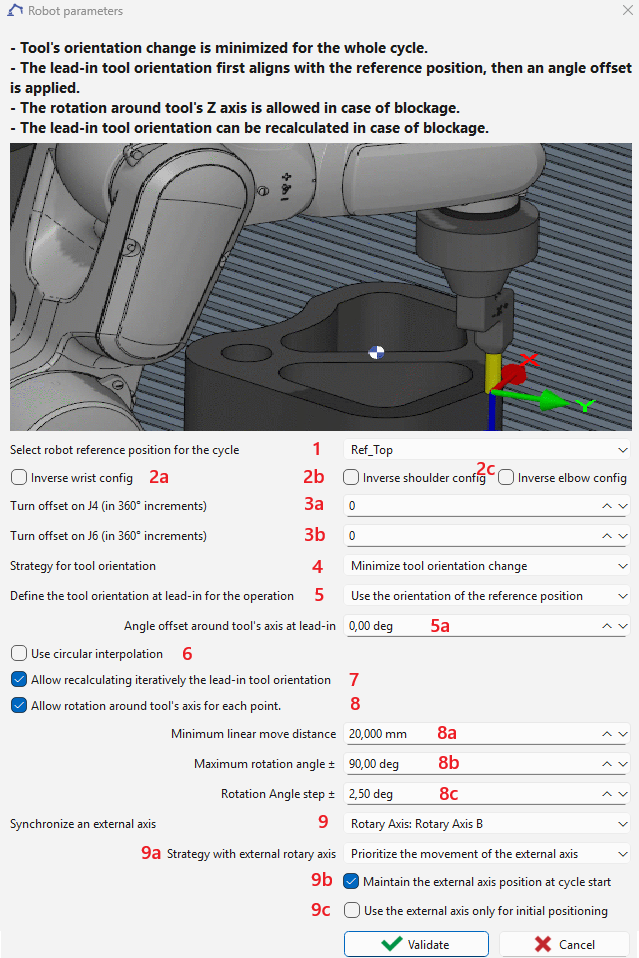
机器人参考位置( 1 )
可以选择参考位置。 默认情况下,使用循环之前的机器人位置。 此参考位置用于:
-
定义 肩肘腕配置 ,在整个循环中保持不变(可以通过选项 2a , 2b , 2c ).
-
定义 参考关节角度位置 ,用于使第一个生成的关节位置尽可能接近它。 这避免了具有多个转弯的轴中的歧义(通常是 J4 和 J6,有时是无限的)。 可以使用 3a应用进一步的转弯调整 和 3b .
-
提出一个 参考 TCP 方向 (如果使用携带的刀具)。然后,导入刀具方向可以是:
-
与此参考方向对齐,并旋转一个偏移角度( 5a ), 或
-
对齐到刀具路径的切线,并具有固定的偏移角度 ( 5b ),具体取决于选项 5 .
-

刀具方向管理 ( 4 )
-
两种模式可用:
-
最大限度地减少刀具方向更改 对于轴对称刀具
-
方向保持尽可能稳定。
-
如有必要,启用选项 8 时可以覆盖此规则。
-
-
跟随刀具路径切线带偏移 对于非轴对称刀具,例如叶轮
-
-
如果由于可达性、关节限制或奇异性而导致连续移动(线性或圆形)失败,则在 最大限度地减少方向变化 模式,启用选项 8 ,TCP可以绕其Z轴旋转以使路径可行。
-
缺点: 这可能会导致小距离上的大旋转,从而导致不良影响(例如,去毛刺过度切割)。选项 8a 和 8b 有助于防止这种情况。
-
-
对于进刀,退刀或返回点(刀具未与零件接触),在两种模式下都允许旋转。
外部轴( 9 )
可以定义一个额外的外部轴:
-
移动机器人的线性轴 ,可以与机器人关节轴同步。
-
移动零件的旋转轴 ,可以与机器人关节轴同步。
-
连接到机器人法兰的线性轴 ,沿 TCP 的 Z 轴移动刀具,仅适用于钻孔、攻牙或螺纹循环。此轴 不能与机器人关节轴同步 ).

该轴必须具有非零标识符才能在此对话框中选择并与机器人轴同步。
在外部轴同步的情况下,附加选项 9a , 9b 和 9c 可用。
9a — 与第七轴的同步策略
您可以选择机器人和第七轴之间的同步策略:
-
优先考虑第七轴运动 :
优先考虑第 7 轴的运动,以便使机器人尽可能靠近由相对于外部轴的选定参考位置定义的纵向位置。 -
最大限度地减少刀具方向变化 :
系统在同步运动期间最大限度地减少刀具方向的变化(刀具框架的 Z 轴,由参考定义)。
9b — 进刀位置策略
您可以选择系统如何到达进刀参考位置:
-
仅机器人逼近 :
机器人移动到参考位置,而外部轴保持静止。 -
同步逼近 :
机器人和外部轴同时移动以到达选定的参考位置。
9c — 路径执行模式
您可以定义是否执行后续路径:
-
由机器人和外部轴共同执行 , 允许同步运动,或
-
仅由机器人 ,在路径执行期间外部轴保持固定。 在此模式下,外部轴仅用于逼近定位,不参与路径期间的协同运动。
附加选项
-
2a , 2b , 2c : Invert shoulder, elbow, or wrist configuration.
-
3a应用进一步的转弯调整 , 3b : Apply a turn offset to J4 or J6.
-
示例: 如果 J6 限制为 [-720°,720°],并且其在循环之前的值为 680°(接近上限),则应用 -1 的转弯偏移会将参考 J6 更改为 320° (680° – 360°)。
-
-
5 : Select method for lead-in orientation.
-
6 : Activate circular interpolation.
-
7 : 如果循环失败,GO2robot 迭代搜索有效的导入方向,使用在 8c 中定义的角度步长。如果成功,值 5a 或 5b 将使用新参数进行更新。
-
8: enable tool orientation change in mode Minimize tool orientation change . 8a , 8b : Additional constraints to avoid excessive orientation changes.