-
一个工作站通常包含比仅仅是机器人手臂更多的设备(隔离单元、外部轴等)。
-
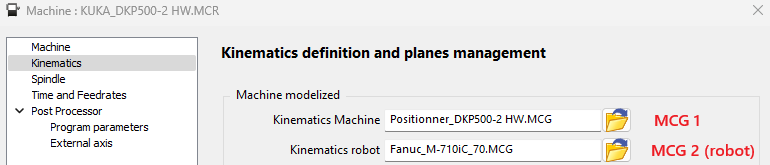
推荐:使用 2 台机器(MCG)
-
MCG 1 = 主机床单元(带 外部元件位置 ).
-
MCG 2 = 仅机器人手臂。
-
使用 2 台机器的优势:
-
易于更换机器人手臂,同时保留主单元( MCG 1 ).
-
机器人底座可以重新定位(双击机器树中的机器人底座)以适应零件/刀具。
-
如果只需要机器人手臂
-
MCG 1 = 机器人手臂。
-
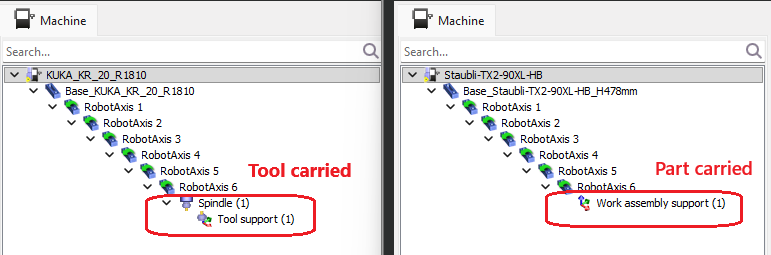
支撑,无论是用于刀具还是工件,都必须始终连接到机器人法兰(RobotAxis 6)。 另一个支撑可以在 MCG 1 或 MCG 2 中定义。
-
刀具支撑 在机器人法兰上 = 刀具携带。
-
工件 支撑 在机器人法兰上 = 零件携带。
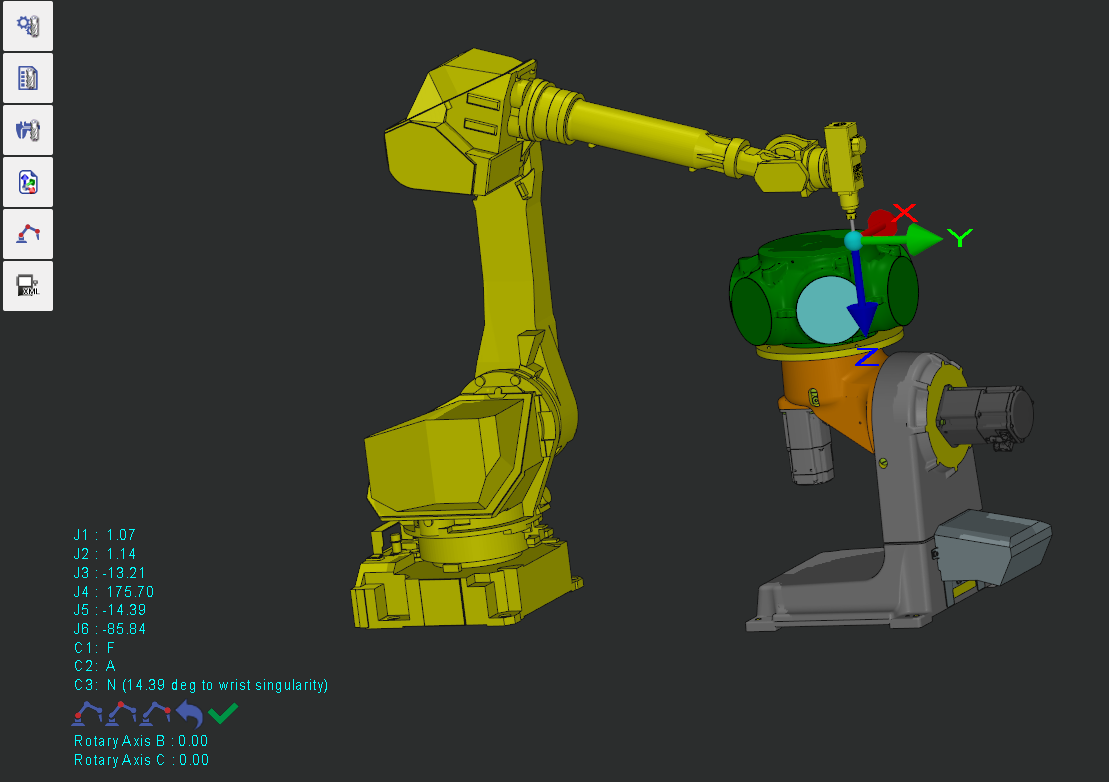
可达性预检查
-
在刀具中,双击零件上的任意点 → 机器人自动定位在那里进行可达性预览。