为何选择机器人?
|
由于机器人技术的进步、生产质量的提高、机器效率的提高和工业化的增加,全球 CAM 市场正在迅速增长。机器人提供 24/7 全天候运行、卓越的可重复性,精度通常低于 50 微米,并且随着时间的推移,投资回报率 (ROI) 很高。它们对于推进工业 4.0、机器学习和人工智能至关重要,推动了各个行业的创新并提高了生产力。 |
机器人离线编程 (OLP)
|
传统上,机器人使用示教器进行示教,示教器是一种手动引导机器人完成任务的手持设备。这种方法可能很麻烦、有风险且耗时。离线机器人编程 (OLP) 允许操作员使用数字 3D 模型远程工作,以在将机器人路径上传到机器人之前生成和验证机器人路径。这减少了手动示教,提高了安全性,并提高了效率。 ROP 的好处:
|

|
GO2cam 机器人的技术特点
|
GO2CAM 拥有实施 OLP 的所有基础设施,并具有强大的数学引擎,用于机器人运动学计算。 GO2CAM 的目标是将机器人编程的大部分难度保留在软件中,并使机器人对客户来说像铣床一样易于使用。 GO2cam 中的 ROP 适用: |
||
|
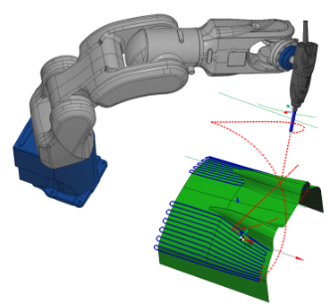
> 对于机器人预计要遵循连续路径的任务,工作流程几乎与机床相同
|
|
|
|
> 对于机器人只需要通过几个航点才能完成的任务,使用交互式界面来规划整个路径
|

|
|
|
该软件几乎可以处理所有串行 6 轴机器人: |
|
|
|
类型 1: 几乎所有工业 6 轴机器人,其中最后 3 个轴在一点相交 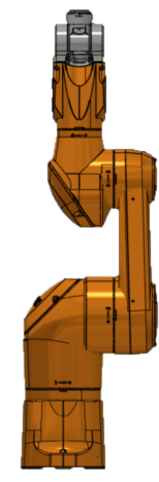
|
类型 2: 大多数协作机器人,其中第 2、3 和 4 轴平行 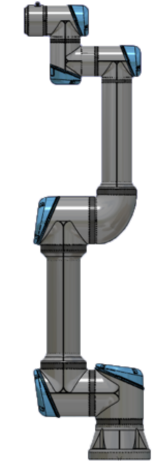
|
类型 3: 类似于类型 1,除了最后三个轴不在一点相交(Fanuc CRX) 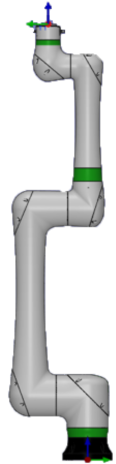
|
在 GO2cam 中对机器人进行编程的步骤主要如下:
-
零件的 CAM,可重复用于其他机器人单元。
-
机器人单元设计,可重复用于其他零件。
-
机器人加工策略设置
-
仿真和碰撞检测
-
PP 和技术功能设置
-
机器人程序生成