如果没有要移除的材料,建议将毛坯设置为与零件相同的几何形状。为此,复制零件并将其指定为毛坯。
使用 启用碰撞检查 运行模拟。如果发生碰撞,有几个选项可用于避免碰撞:
-
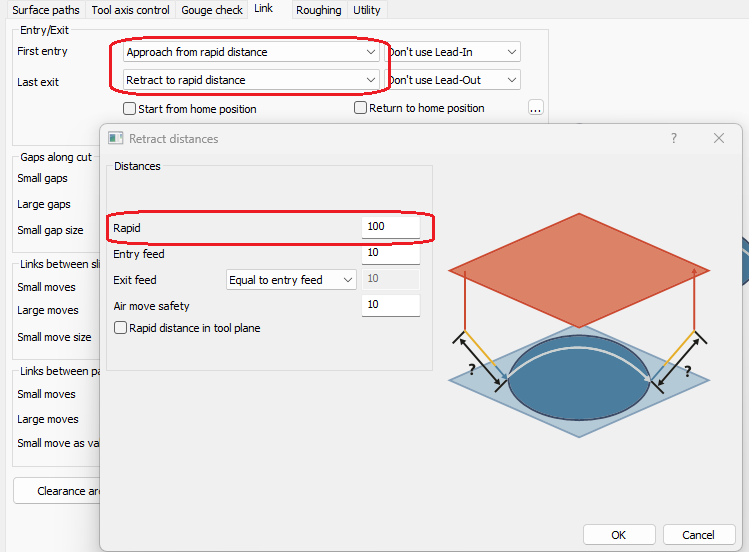
如果循环的进刀点或退刀点发生碰撞:
-
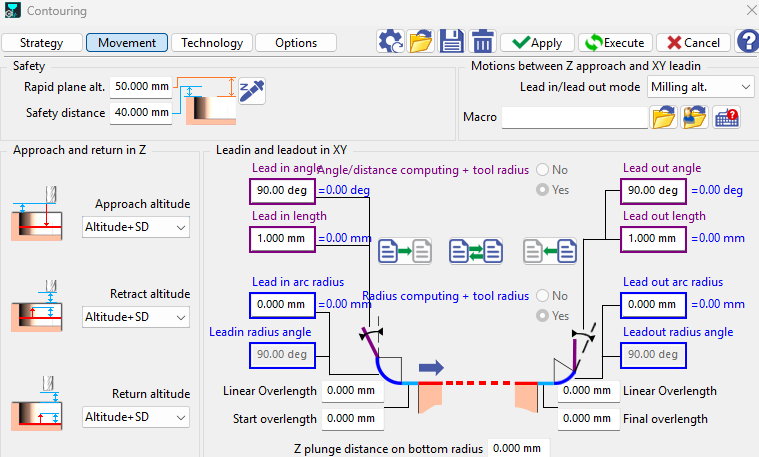
重置进刀/退刀参数(例如,距离)。
-
添加额外的进刀/退刀点。
-
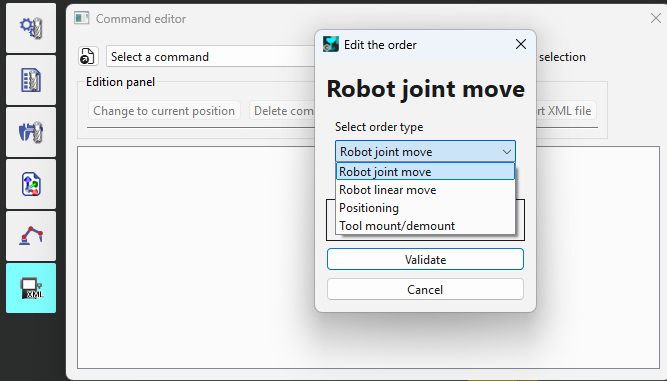
Create and insert a 机床指令 move before or after the cycle.
-
除非必要,否则不要使用机器人线性移动 ,以避免奇点的风险。
-
建议: 优先使用方法 a 或 b ,因为它们修改了循环本身,然后可以将其重复用于其他机器人(例如,在 Opelist 中)。
-
-
要使非机器人轴可选择用于机床指令 定位 ,必须将其定义为 可编程 .
不建议在 GO2Robot 中使用 MOVE_COMPONENT 。首先,单个 MOVE_COMPONENT 命令仅移动一个轴;要移动一个 6 轴机器人,您将需要六个单独的 MOVE_COMPONENT 命令,并且这些移动将不同步。其次,输出机器人的 CN 文件是不合适的。相反,使用 机床指令 ,它可以同时移动多个轴。
-
对于其他情况:
-
更改循环的机器人策略。
-
修改机器人参考位置。
-
重新定位机器人或零件以测试新的机器人路径。
-
…
-