This page refers to the robot strategy dialog in version 6.12.207.
Geri çağırma :
Çevrimin takım yolu önceden hesaplanır. Takım yolunun her noktası için aşağıdaki veriler sağlanır:
-
Nokta konumu
-
Z ekseni yönü (X ve Y eksenleri tanımsız kalır)
6 Eksenli Endüstriyel Robotlar ve Geleneksel NC Makineleri Arasındaki Farklar
-
Yedekli konfigürasyonlar:
omuz için 2, dirsek için 2 ve bilek için 2 → toplam 8 olası konfigürasyon. -
Yedekli dönüşler (özellikle J4 ve J6'da):
Aynı Kartezyen yol, J6 [-180°, 180°] veya [180°, 540°] . -
TCP'nin (takım merkezi noktası) gereksiz yönlendirmeleri ile yürütülebilir:
6 eksenli endüstriyel robotlar, tamamen tanımlanmış bir takım yönü sağlar. X ve Y eksenleri önceden tanımlanmamışsa, olası yönler sonsuzdur.
Bir Referans Konumuna İhtiyaç Duyulması
Kısmen tanımlanmamış yönlendirmeye sahip bir takım yolunu belirsizlik olmadan robot mafsal konumlarına dönüştürmek için, bir referans konumu gereklidir. Ondan şunu çıkarırız:
-
Robot referans konfigürasyonu (çevrim boyunca korunur).
-
Robot referans mafsal açıları , ilk oluşturulan robot pozisyonunun takılacağı (özellikle J4 ve J6 olmak üzere mafsal dönüşlerini belirlemek için).
-
Referans TCP yönlendirmesi , giriş takım yönünü tanımlamak için kullanılır.
Referans konumu şu şekilde tanımlanabilir:
-
Eklem formatı (robota özgü) → ileri kinematik yoluyla takım yönü,
-
Yapılandırmalı Kartezyen formatı (genel) → ters kinematik yoluyla eklem pozisyonları.
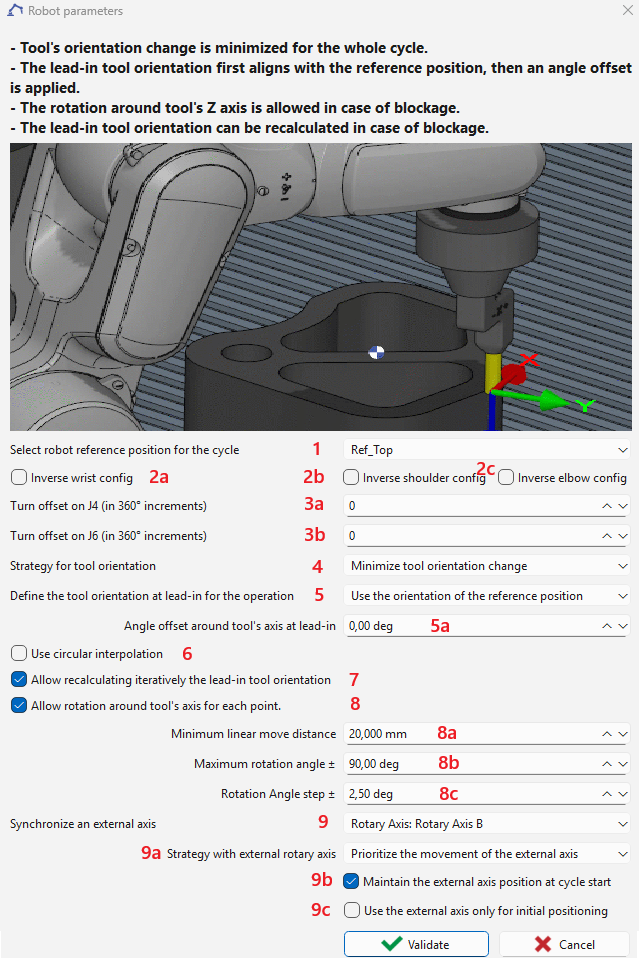
Robot Referans Konumu ( 1 )
Referans konumu seçilebilir. Varsayılan olarak, döngüden önceki robotun konumu kullanılır. Bu referans konumu şunlar için kullanılır:
-
Tanımla omuz-dirsek-bilek konfigürasyonu , döngü boyunca korunur (seçeneklerle ters çevrilebilir 2a , 2b , 2c ).
-
Tanımla referans eklem açısı konumu , böylece oluşturulan ilk eklem konumu ona mümkün olduğunca yakın olur. Bu, birden fazla dönüşe sahip eksenlerdeki (genellikle J4 ve J6, bazen sonsuz) belirsizliklerden kaçınır. Daha fazla dönüş ayarlaması şunlarla uygulanabilir: 3a ve 3b .
-
Önerilen bir referans TCP yönü (taşınan bir takım olması durumunda). Giriş takımı yönü daha sonra şu şekilde olabilir:
-
bu referans yönüne hizalanır ve bir ofset açısıyla döndürülür ( 5a ), veya
-
takım yolunun teğetine sabit bir ofset açısıyla hizalanır ( 5b ), 5 .
-

Tool Orientation Management ( 4 )
-
İki mod mevcuttur:
-
Takım yönü değişikliğini en aza indirin eksen simetrik takımlar için
-
Oryantasyon mümkün olduğunca sabit tutulur.
-
Gerekirse, bu kural 8 numaralı seçenek etkinleştirildiğinde geçersiz kılınabilir.
-
-
Ofset ile takım yolu teğetini takip et Bıçak gibi eksen simetrik olmayan takımlar için
-
-
Sürekli bir hareket (doğrusal veya dairesel), erişilebilirlik, mafsal limitleri veya tekillikler nedeniyle başarısız olursa, Oryantasyon değişikliğini en aza indirin modunda, 8 seçeneği etkinleştirildiğinde, TCP, yolu uygulanabilir hale getirmek için Z ekseni etrafında döndürülebilir.
-
Sakıncası: Bu, küçük mesafelerde büyük dönüşlere neden olabilir ve istenmeyen etkilere (örneğin, çapak almada fazla kesme) yol açabilir. Seçenekler 8a ve 8b bunu önlemeye yardımcı olur.
-
-
Yaklaşma, geri çekme veya dönüş noktaları (takımın parça ile temas halinde olmadığı yerlerde), her iki modda da döndürmeye her zaman izin verilir.
Harici Eksenler ( 9 )
Ek bir harici eksen tanımlanabilir:
-
Robotu hareket ettiren doğrusal eksen , robot mafsal ekseni ile senkronize edilebilir.
-
Parçayı hareket ettiren döner eksen , robot mafsal ekseni ile senkronize edilebilir.
-
Robot flanşına bağlı doğrusal eksen , takımı TCP'nin Z ekseni boyunca hareket ettirir, yalnızca delme, kılavuz çekme veya diş çekme çevrimleri için seçilebilir. Bu eksen robot mafsal ekseni ile senkronize edilemez ).

Eksenin, bu iletişim kutusunda seçim için kullanılabilir olması ve robot eksenleriyle senkronize edilmesi için sıfır olmayan bir tanımlayıcıya sahip olması gerekir.
Harici eksen senkronizasyonu durumunda, ek seçenekler 9a , 9b ve 9c mevcuttur.
9a — 7. Eksen ile Senkronizasyon Stratejisi
Robot ve 7. eksen arasındaki senkronizasyon stratejisini seçebilirsiniz:
-
7. eksen hareketine öncelik verin :
7. eksen hareketi, robotu harici eksene göre seçilen referans konumu tarafından tanımlanan uzunlamasına konuma mümkün olduğunca yakın tutmak için önceliklidir. -
Takım yönlendirme değişikliğini en aza indirin :
Sistem, senkronize hareket sırasında takım yönündeki (referans tarafından tanımlanan takım çerçevesinin Z ekseni) varyasyonları en aza indirir.
9b — Giriş Konumu Stratejisi
Sistemin giriş referans konumuna nasıl ulaşacağını seçebilirsiniz:
-
Yalnızca robot yaklaşımı :
Robot, harici eksen sabit kalırken referans konumuna hareket eder. -
Senkronize yaklaşım :
Hem robot hem de harici eksen, seçilen referans konumuna ulaşmak için aynı anda hareket eder.
9c — Yol Yürütme Modu
Sonraki yolun yürütülüp yürütülmeyeceğini tanımlayabilirsiniz:
-
Hem robot hem de harici eksen tarafından , senkronize harekete izin verir veya
-
Sadece robot tarafından , yol yürütme sırasında harici eksen sabit kalır. Bu modda, harici eksen yalnızca yaklaşma konumlandırması için kullanılır ve yol boyunca koordineli harekete katılmaz..
Ek Seçenekler
-
2a , 2b , 2c : Invert shoulder, elbow, or wrist configuration.
-
3a , 3b : Apply a turn offset to J4 or J6.
-
Örnek: Eğer J6 [-720°, 720°] ile sınırlıysa ve döngüden önceki değeri 680° (üst sınıra yakın) ise, -1'lik bir dönüş ofseti uygulamak, referans J6'yı 320° (680° – 360°) olarak değiştirir.
-
-
5 : Select method for lead-in orientation.
-
6 : Activate circular interpolation.
-
7 : Döngü başarısız olursa, GO2robot, 8c içinde tanımlanan bir açı adımı kullanarak, geçerli bir giriş yönü için yinelemeli olarak arama yapar. Başarılı olursa, değer 5a veya 5b yeni parametre ile güncellenir.
-
8: enable tool orientation change in mode Minimize tool orientation change . 8a , 8b : Additional constraints to avoid excessive orientation changes.