A basic workflow to program a robot in GO2CAM is as such:
Robot Modülü
Robot arayüzü MTE ortamına benzer görünebilir, ancak kendi ayrı modülüdür. Paketi satın alırsanız ana sayfadan erişilebilir, bir robot dosyası yalnızca bu modülde açılabilir. |
|
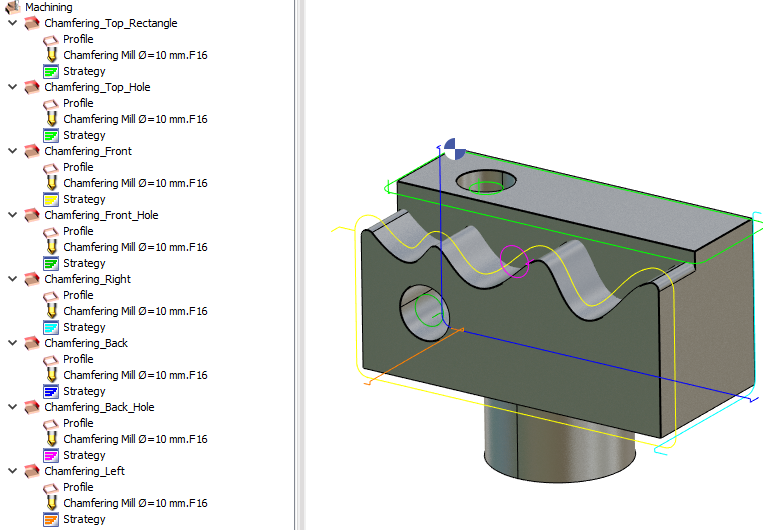
Bir parçanın CAM programlamasıBu işlem parçası, İşleme merkezi modülündeki programlamaya benzer. Parçayı içe aktarın. Döngüleri tanımlayın; her zamanki gibi geometri seçimi, takım seçimi ve döngü seçimi. Robot bir freze makinesi olarak kabul edilir, bu nedenle standart, 3X'ten gelişmiş 5X'e kadar robotik işleme için herhangi bir freze döngüsü kullanılabilir. Takımın hareketini hesaplayın ve simüle edin. Parça ile yaklaşma ve geri dönüş takım yolunu manuel olarak kontrol etmek için geometri seçimi sürecinde birkaç Yaklaşma ve Geri Dönüş noktası tanımlanabilir. |
|
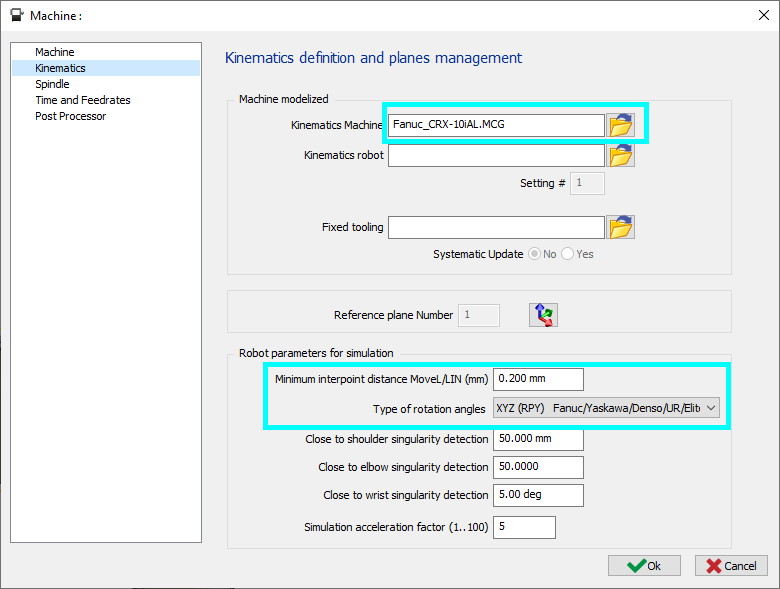
Robot YapılandırmasıRobot kinematiği Bir veya daha fazla döngü hatasız oluşturulup hesaplandıktan sonra, seçilen takımı işleme döngülerini yürütmek için sürecek bir robot seçin. İşleme ağacında Makine'ye sağ tıklayın ve ardından Düzenle'yi seçin. Makine iletişim kutusu açılacaktır. Kinematik Makine için bir Robot .MCG dosyası seçin, parametreleri tanımlayın ve doğrulamak için Tamam'ı tıklayın. Bir robot hücresi tanımlanacaksa, 2 .MCG dosyası ayarlanmalıdır. Kinematik robot, bağımsız bir robot olmalı, Kinematik Makine ise hücrenin diğer parçaları olabilir. Böyle bir durumda, robotun eksen konumunu hareket ettirmek mümkün değildir. Robotun tüm bileşenlerine tam erişime sahip olmak için yalnızca bir MCG ile çalışmanız önerilir. Minimum ara nokta mesafesi MoveL/LIN (mm) : Bu, robot programı oluşturma için doğrusal bir hareket için minimum mesafedir, bu, daha az noktayla yolu daha hızlı hareket ettirerek yüksek hassasiyete ihtiyaç duymadan eğri yolu için faydalı olabilir (simülasyon bu parametreden etkilenmeyecektir). Dönme açıları türü kullanılan robot markasına göre ayarlanabilir. Eşik değerleri, omuz, dirsek ve bilek eklemi için tekillik tespiti için ayarlanabilir. Robot, Makine menüsüne gidip Takımlama alt menüsünü seçerek parça ile görselleştirilebilir. Robot, ağaçtaki robot adına orta tıklama ile gizlenebilir. Bu, parça robot gövdesi tarafından gizlenmesi durumunda kullanışlıdır. |
|
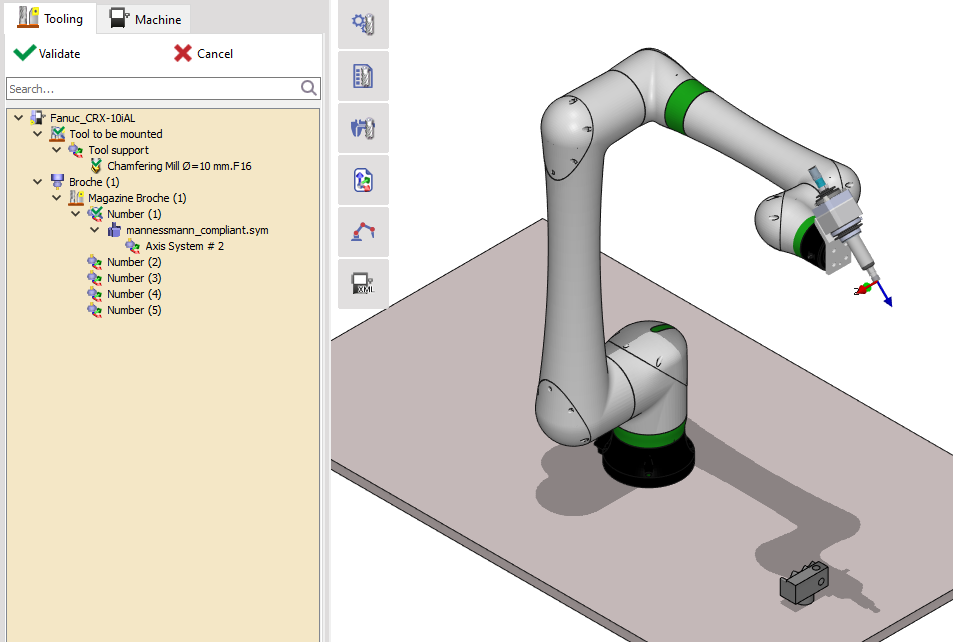
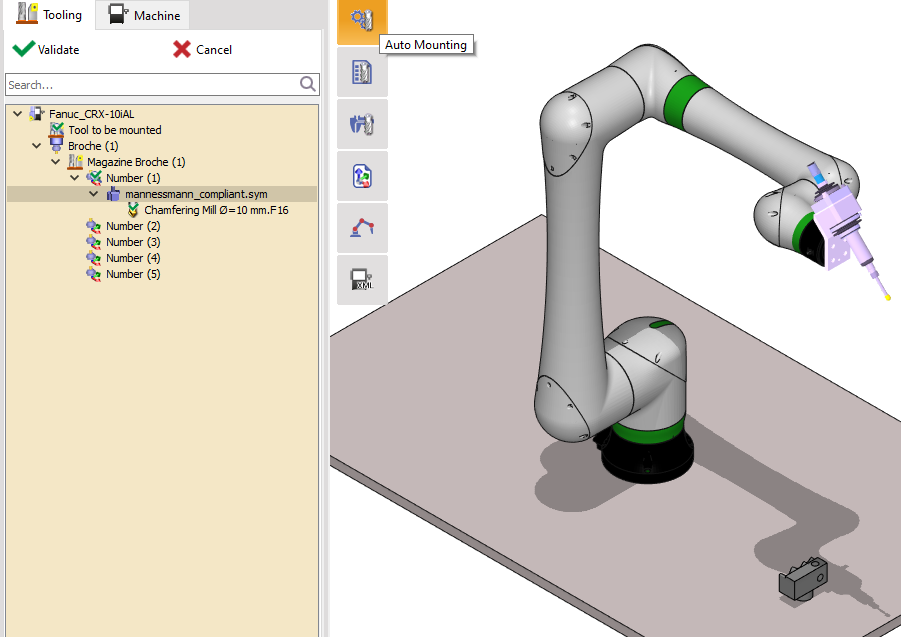
Takım ve Parça YapılandırmasıTakımları ve takım tutucuları yüklemek, MTE'ye benzer bir işlemdir. Takımı robota monte etmek için Otomatik montaj'ı tıklayın. Bir takım tutucu eklemek için takıma veya robotun uç eksenine sağ tıklayın. Takım, Takımlama sekmesinde daha fazla yapılandırılabilir ve parça, Makine sekmesinde yeniden konumlandırılabilir.
|
|
|
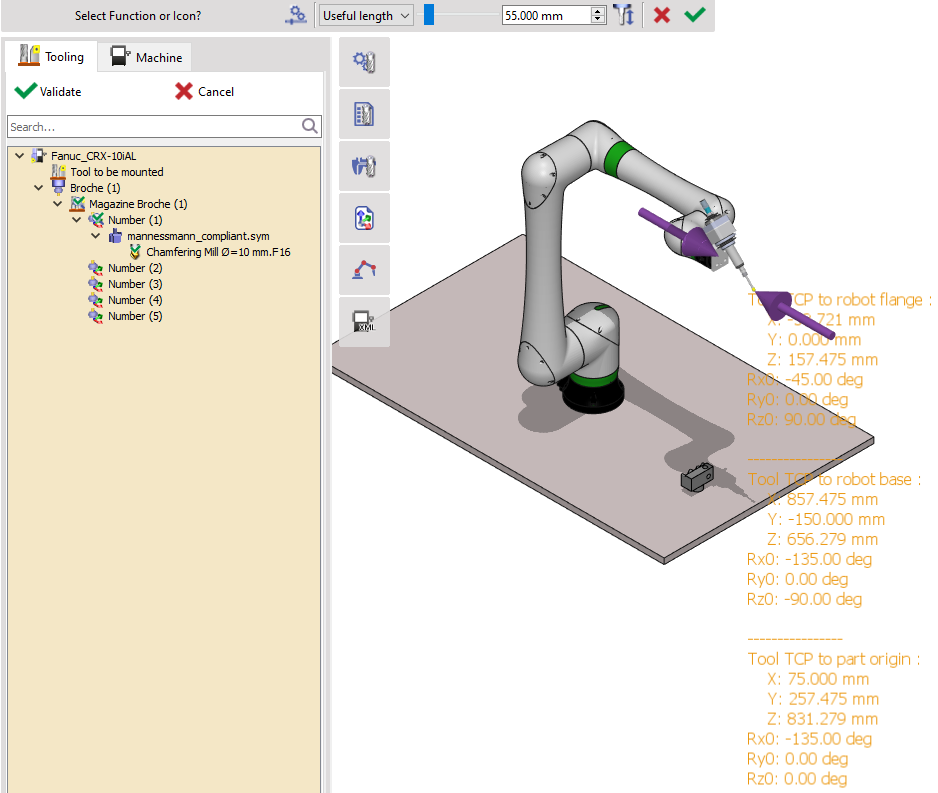
Takım Ağaçta veya program penceresinde takıma çift tıklayarak, robot flanşına göre Takım Merkezi Noktası (TCP) gösterilir, ayrıca üst şeritte takımın faydalı uzunluğunu da değiştirebilirsiniz.
TCP, X, Y, Z, Rx0, Ry0, Rz0 olarak ifade edilir.
|
|
|
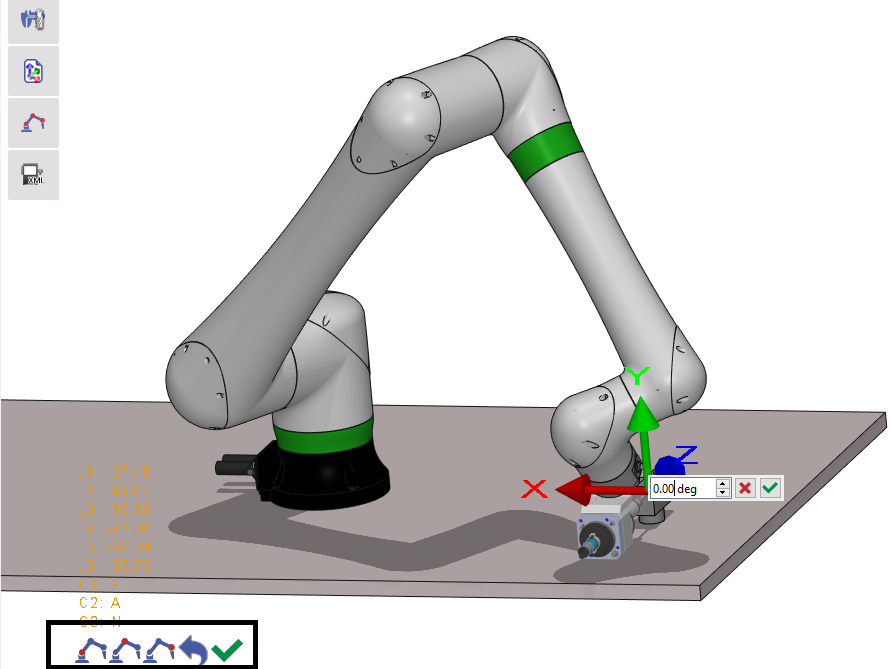
Parça Erişilebilirliği Başlangıçta, parçanın konumu robot için çok yakın veya çok uzak olabilir. Robot için parçanın erişilebilirliği tahmin edilebilir. Takımlama sekmesindeyken, parçanın bir noktasına çift tıklayın, bu nokta erişilebilirse robot, bu noktaya takımıyla veya bu noktaya dik olan flanş noktasıyla dokunmak için hareket ettirilecektir, aksi takdirde bir mesaj gösterilecektir. Takım çerçeve eksenlerini göstermek ve takımı hareket ettirmek için, robota çift tıklayın ve tıklayarak bir takım seçin (bir robot aynı anda birden fazla takıma sahip olabilir). Aynı takım konumunu korurken, sol alt kısımdaki üç simge ile robot yapılandırmasını değiştirin. Ayrıca, çeviri ve döndürme için eksen okuna sol tıklayıp sürükleyerek veya bir çeviri veya döndürme değeri belirtmek için eksene sağ tıklayarak çerçeveyi hareket ettirmek de mümkündür. |
|
|
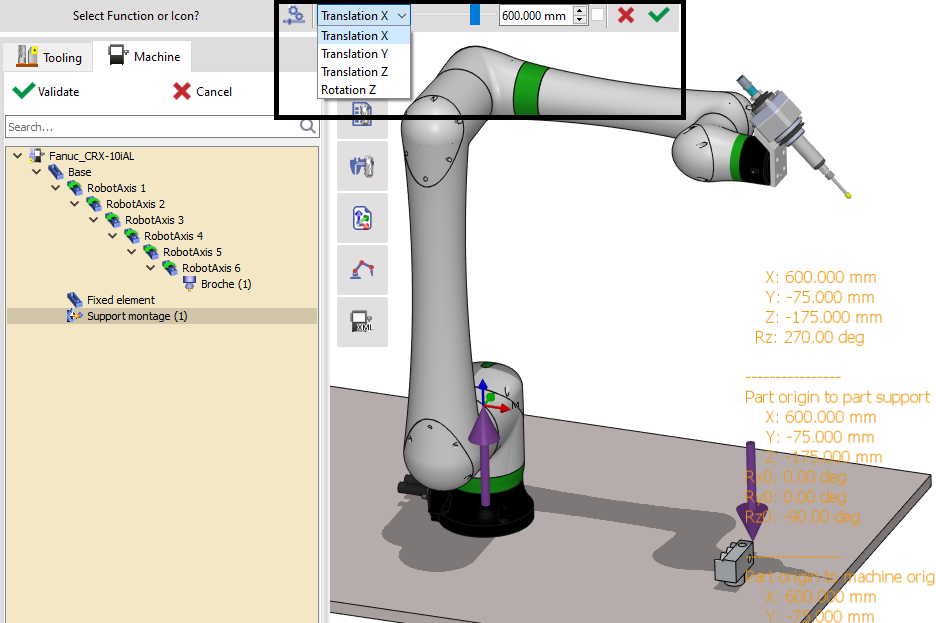
Parça Yeniden Konumlandırma Parça, robota göre yeniden konumlandırılabilir. Makine sekmesine geçin, çalışma montaj desteğine (bu örnekte Destek montajı olarak yeniden adlandırılmıştır) çift tıklayın. Parçanın kartezyen konumu, robotun taban çerçevesinde görülebilir Parçayı X, Y, Z yönünde ve yalnızca Z etrafında döndürme, şeritteki fonksiyonlarla Değişikliği doğrulayın.
|
|
|
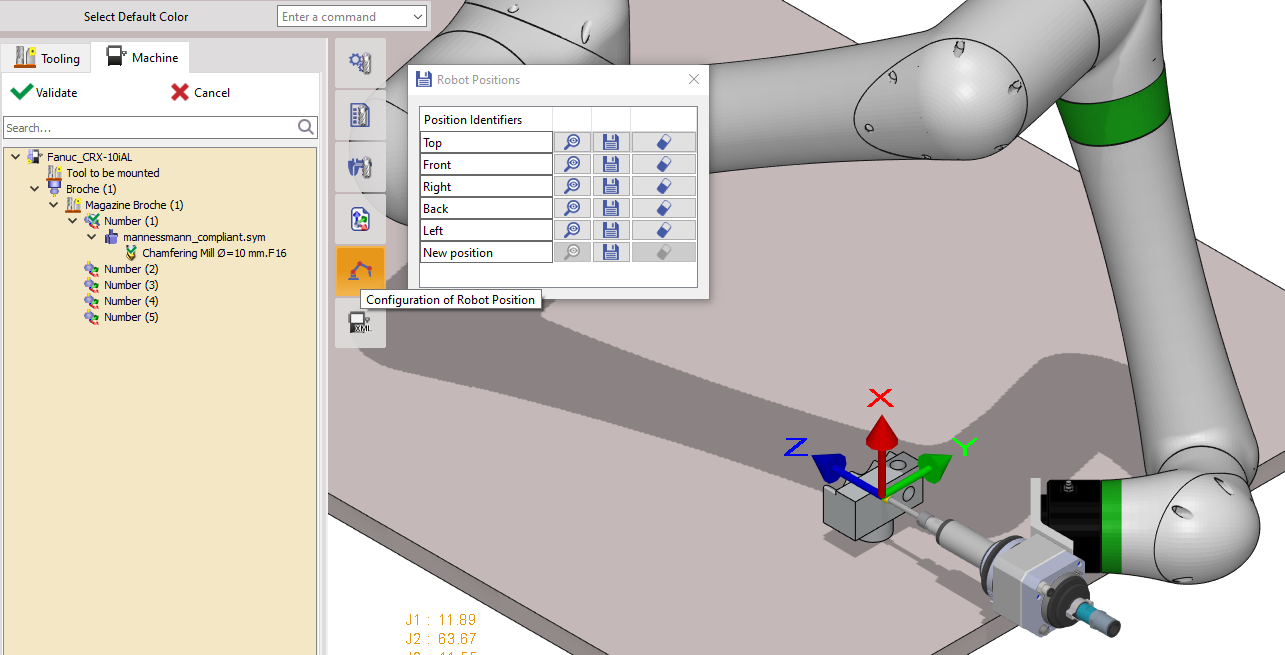
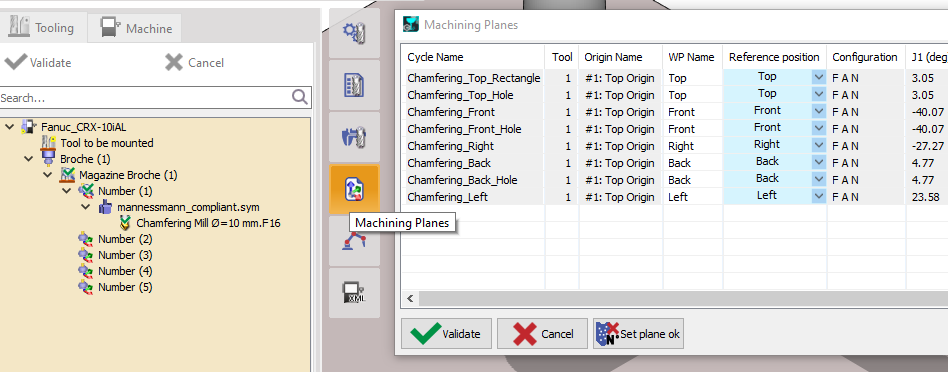
Her döngü için referans konumu Kutuplu nokta aracılığıyla robotun konumlandırılması gereksiz olduğundan, bir düzlemdeki bir döngünün yapılandırması veya yönü, başka bir düzlemdeki başka bir döngü için uygun olmayabilir, her döngü için bir referans konumu tanımlamak daha iyidir. Aslında, her döngünün ortak konum yolunu oluşturmak için bir referans konumu gereklidir. Bu döngü için tüm yol boyunca, referans konumunun aynı yapılandırması korunur ve yönlendirme referans alınır. Bu konuda daha fazla bilgi edinmek isterseniz, buraya tıklayın: Robot Referans Konumu Oluşturma . Yeni bir referans konumu eklemek veya mevcut olanları değiştirmek için, sol araç çubuğundaki Robot Pozisyonunun Yapılandırılması komutuna tıklayın. Robotu düzleme göre bir yüze konumlandırın. Aleti TCP eksenlerini sürükleyerek yönlendirmeyi değiştirin ve robotun yüzeyde uygun bir konumlandırmasını sağlayın Yapılandırmayı, ilgili düzlemler için kaydetme simgesiyle kaydedin. Gerekli tüm referans konumları oluşturulup kaydedildikten sonra, tanımlanan döngülerle ilişkilendirilmesi gerekir. Bunun için, İşleme Yüzeyleri komutunu açın ve her döngü için referans konumunu atayın. Bir döngü için hiçbir referans konumu atanmamışsa, önceki döngülerin sonuncusu alınacaktır. İlk döngü için referans konumu ilişkilendirilmemişse, kinematik dosyasında (.MCG) tanımlanan başlangıç robotu ortak konumu alınır. Sonuç olarak, döngülerden hiçbiri bir referans konumuyla ilişkilendirilmemişse, tüm bu döngüler için başlangıç robotu ortak konumu uygulanacaktır. |
|
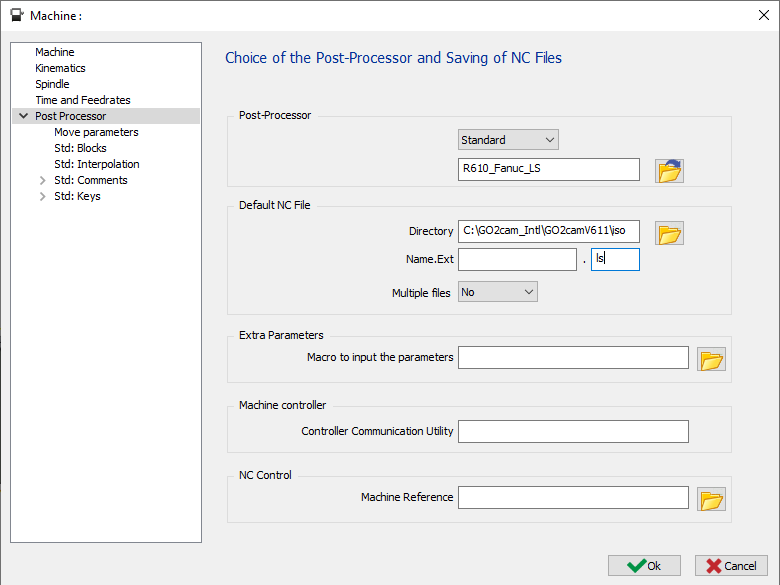
Post-işlemci SeçimiMTE'ye benzer şekilde, robot ve program oluşturma ile simülasyon için bir post-işlemci seçilmesi gerekir. İşleme ağacında, tekrar Makine penceresini açın ve Post İşlemci menüsüne gidin. PP türünü Standart olarak tutun ve ardından robot için doğru PP'yi seçin. Bu durumda, bir FANUC robotu olduğundan, R610_Fanuc_LS seçilir. Gerekirse, çıktı program adı (Ad. EXT) ve uzantı adı da belirtilebilir. |
|
Robot Stratejisi KurulumuTakım yolunu simüle etmeden önce, takım yolunu Robot hareket yollarına dönüştürmek için Robot stratejisini ayarlamamız gerekir. Buraya tıklayın: Robot Stratejisi Kurulumu |
|
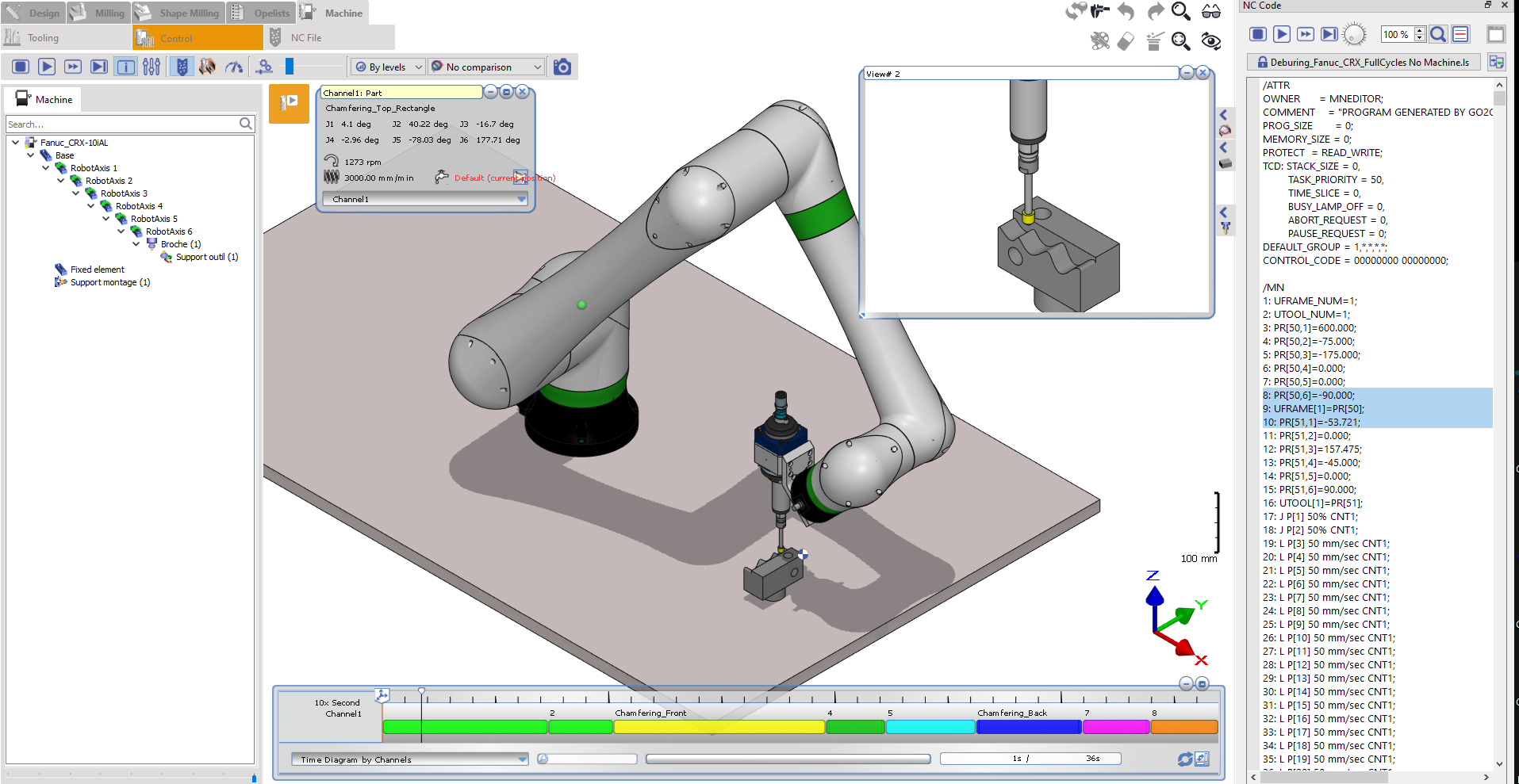
Simülasyonİşleme döngüleri tanımlandıktan, robot seçildikten, takım ve parça yapılandırıldıktan ve Post-işlemci seçildikten sonra, robotlu simülasyon Kontrol menüsünde başlatılabilir. Bu noktada, parametreler ve simülasyon ortamı MTE ile aynıdır. |
|
Çarpışma ÖnlemeKaldırılacak önemli bir malzeme yoksa, stoğu parçayla aynı geometriye ayarlamanız önerilir. Bunu yapmak için, parçayı çoğaltın ve stok olarak atayın. Simülasyonu çalıştırın çarpışma kontrolü etkinleştirildi . Çarpışmaları önlemek için mevcut çeşitli seçenekleri buradan kontrol edin: Çarpışma Önleme . |
|
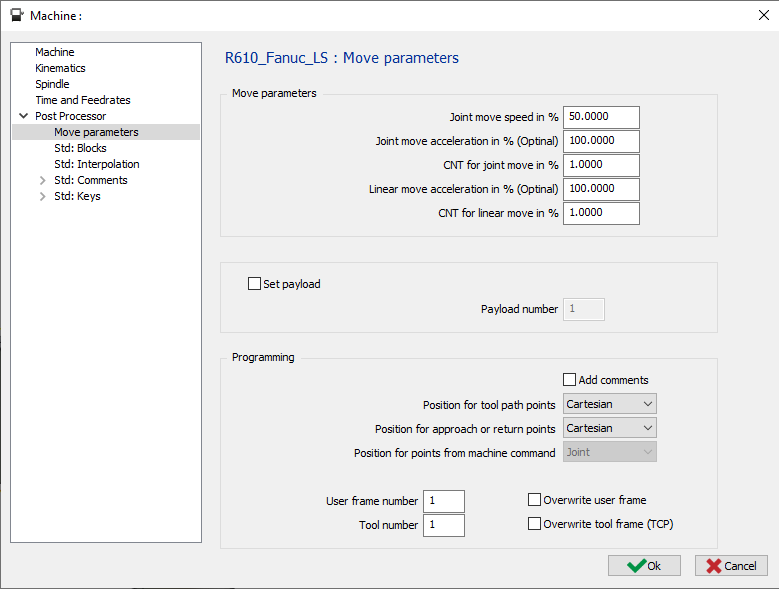
Robot program outputRobot program parameters setting Robot programını oluşturmadan önce, birkaç parametrenin belirtilmesi gerekir. Eklem hareket hızı %, Eklem hareket ivmesi % (isteğe bağlı), Eklem hareketi için CNT %, Doğrusal hareket ivmesi % (isteğe bağlı), Doğrusal hareket için CNT %, Post Processor'daki hareket parametreleri alt menüsündeki Makine parametreleri penceresinde yapılandırılabilir. Yük ayarlanabilir ve takım yolu için konumlandırma ve Yaklaşma ve Dönüş noktaları Kartezyen ve Eklem arasında seçilebilir. |
|
|
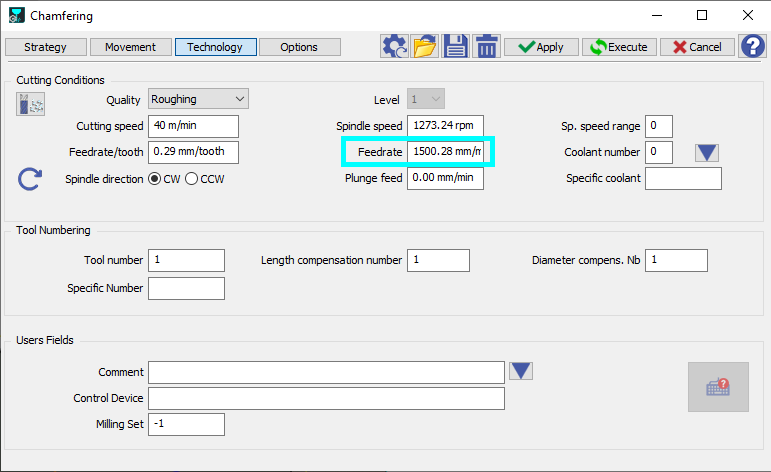
Robot linear speed setting Her döngü için doğrusal hız, Teknoloji sekmesi altında her döngü stratejisi için erişilebilir ve değiştirilebilir. mm/dak cinsinden olan İlerleme parametresi, robotun doğrusal hızını yönetir. Herhangi bir değişiklik, değişiklikleri doğrulamak için Yürütmek tıklanarak uygulanmalıdır. |
|
|
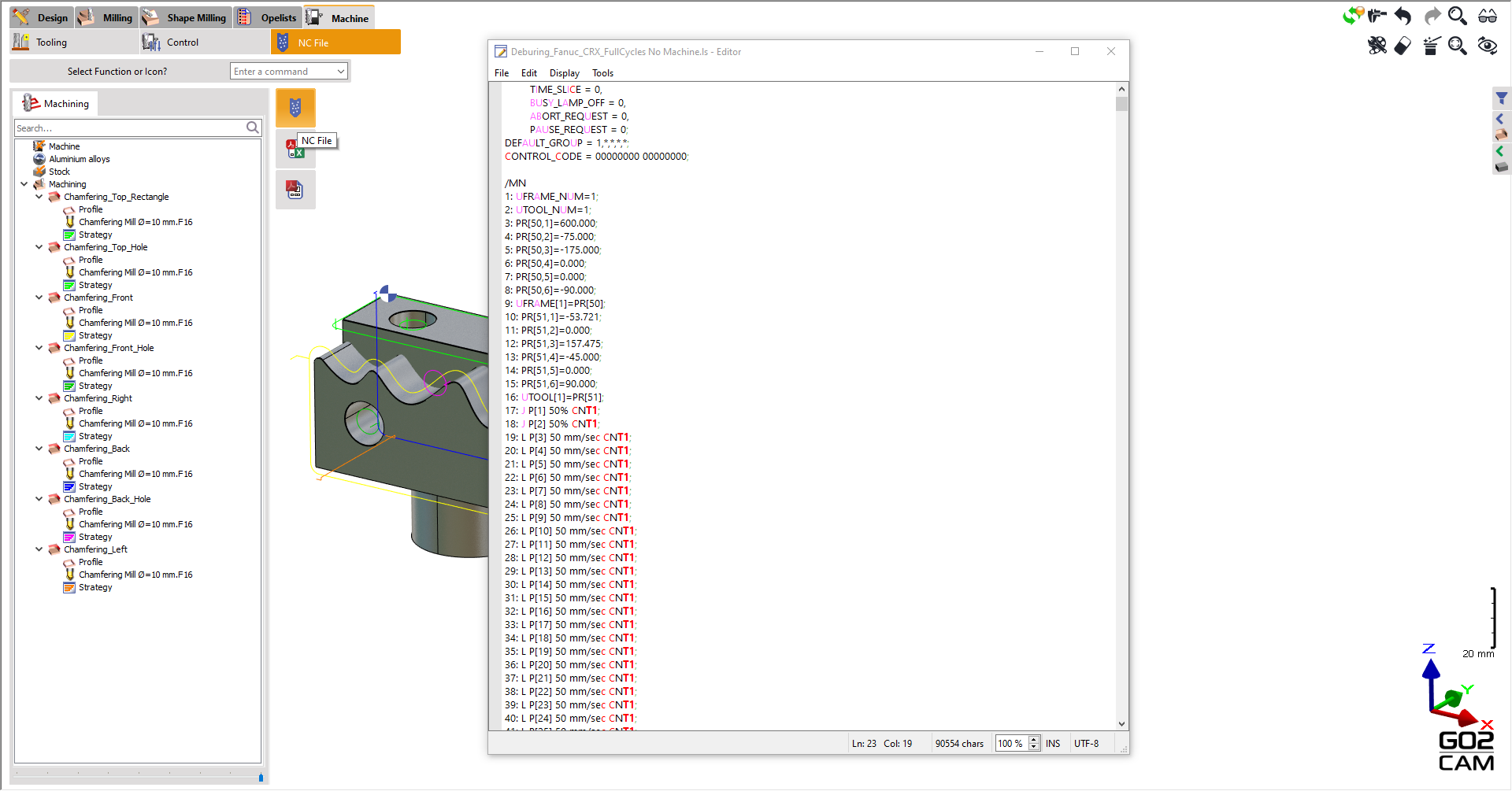
NC output NC Dosyası Alt menüsündeki NC dosyası komutuna tıklayarak NC kodunu oluşturun. |
|
|
Sağda iş akışını gösteren bir videoyu izleyin.
|
|

Robot Controller
|
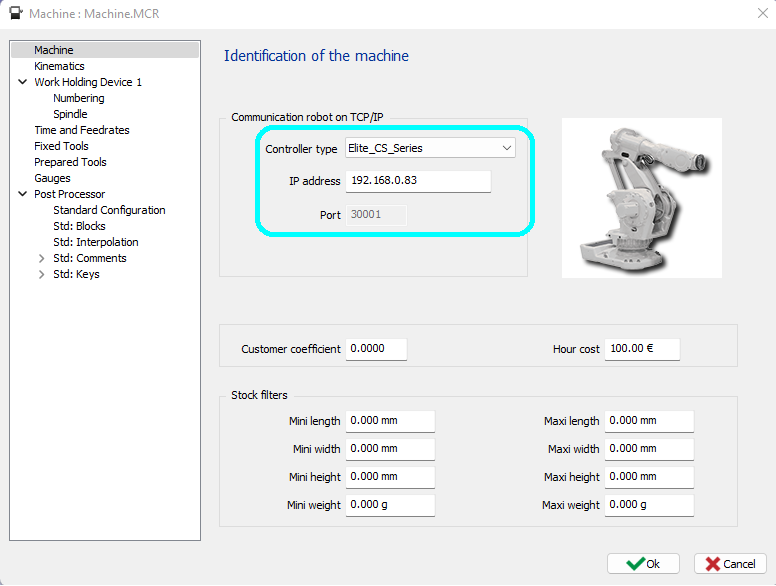
Robot controller connection setting Çıktı programı daha sonra robot simülatöründe veya gerçek robotta çalıştırılabilir. Doğrulanması için programı bir simülatörde çalıştırmanız önerilir. Birkaç robot için, IP/TCP veya simülatör üzerinden robot kontrolcüsüne bağlanmak ve program çalışırken robot hareketini senkronize etmek mümkündür, bunun için Makine ayarları penceresine gidin, robot kontrolcüsü tipini seçin, IP adresini ve port numarasını girin. Sağda bir örnek bulunmaktadır. |
|
|
GO2CAM'de robot programı çalışırken senkronize etme Gerçek bir robot veya simülatörü bir program çalıştırıyorsa, gerçek zamanlı gerçek konum GO2CAM'de senkronize edilebilir (aslında tüm robotlar desteklenmez). Senkronizasyonu başlatmak için, Takımlandırma'ya gidin ve sol alt köşedeki senkronizasyonu başlat simgesini seçin. Doğru takım yolunu çizmek için doğru takımın seçildiğinden emin olun. Kontrolcüye bağlı olarak, robot TCP doğrusal hızını ve nokta indeksini bile alabiliriz. |
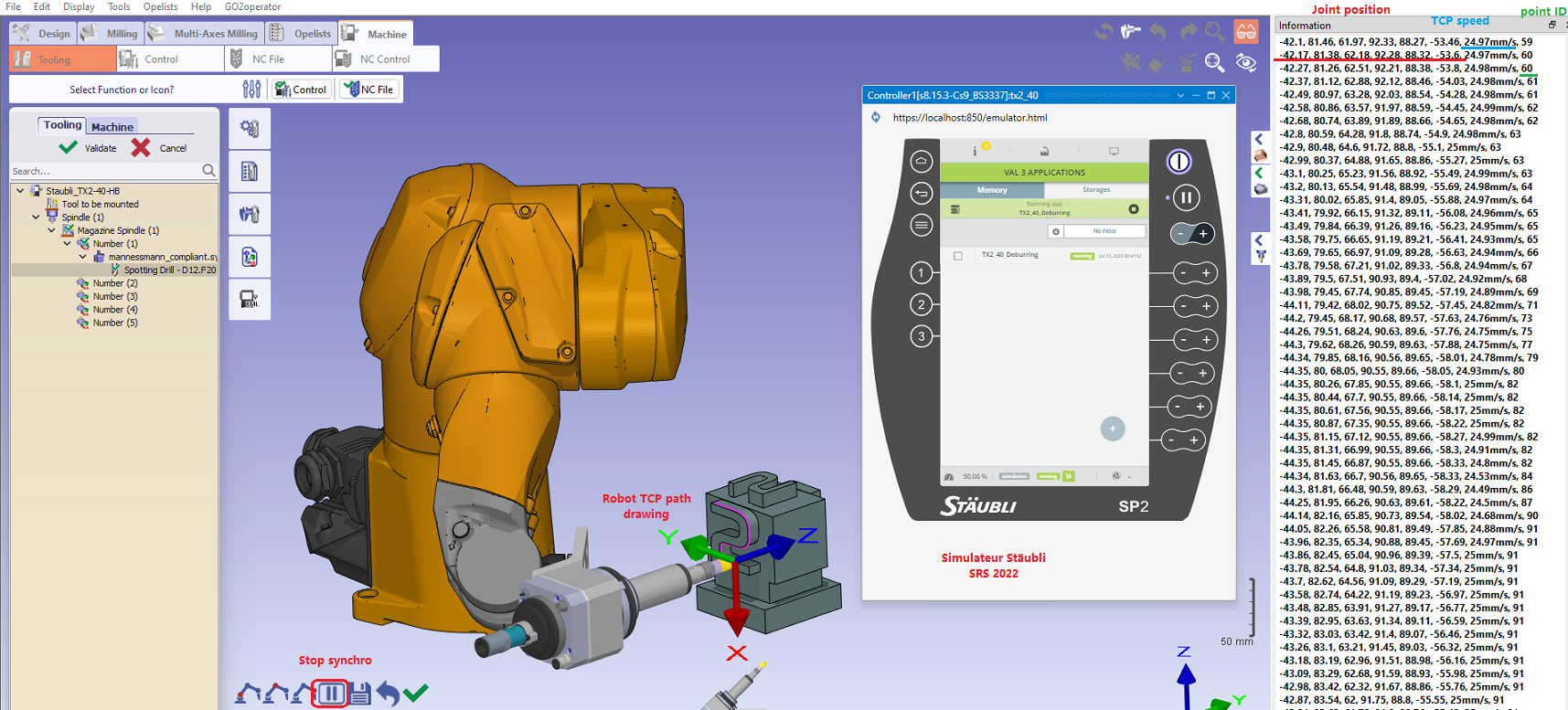
|