Çıkarılacak önemli bir malzeme yoksa, stoğu parçayla aynı geometriye ayarlamanız önerilir. Bunu yapmak için, parçayı çoğaltın ve stok olarak atayın.
Simülasyonu çarpışma kontrolü etkin ile çalıştırın. Çarpışmaları önlemek için çeşitli seçenekler mevcuttur:
-
Bir döngünün yaklaşma veya geri dönüş noktalarında çarpışmalar meydana gelirse:
-
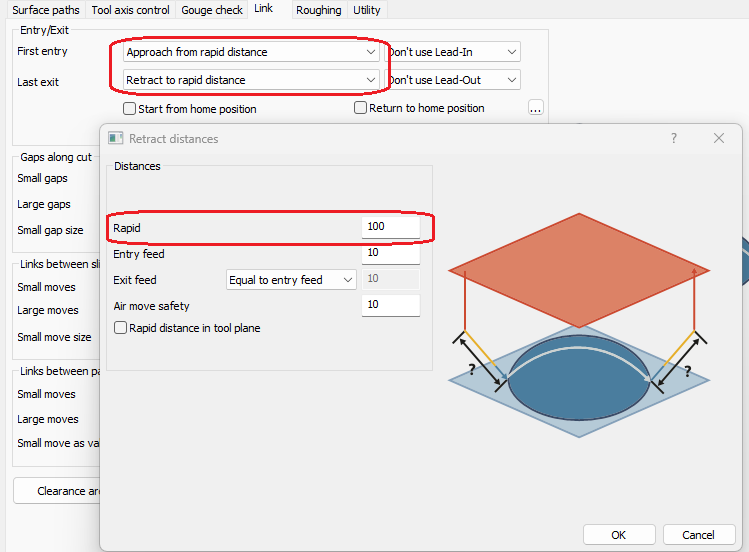
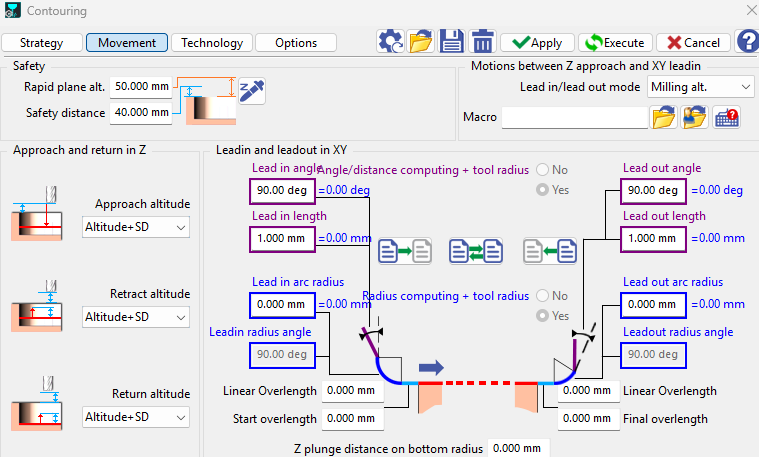
Yaklaşma/dönüş parametrelerini sıfırlayın (örneğin, mesafe).
-
Ek yaklaşma/dönüş noktaları ekleyin.
-
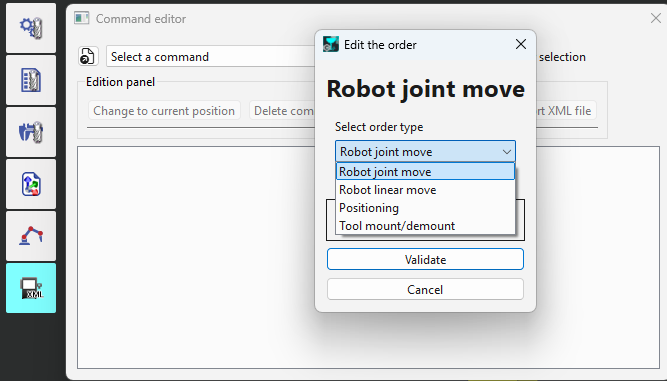
Create and insert a Makine Komutu move before or after the cycle.
-
Tekillik riskini önlemek için , robot doğrusal hareketini yalnızca gerektiğinde kullanın.
-
Tavsiye: Döngünün kendisini değiştirdikleri için a veya b yöntemlerini tercih edin; bu daha sonra diğer robotlar için (örneğin, bir Opelist'te) yeniden kullanılabilir.
-
-
Makine komutu için robot olmayan bir ekseni seçilebilir hale getirmek için Konumlandırma , programlanabilir .
GO2Robot'ta olarak tanımlanmalıdır. kullanılması önerilmez. İlk olarak, tek bir MOVE_COMPONENT komutu yalnızca bir ekseni hareket ettirir; 6 eksenli bir robotu hareket ettirmek için altı ayrı MOVE_COMPONENT komutuna ihtiyacınız olur ve hareketler senkronize edilmez. İkincisi, robotlar için CN dosyaları çıkarmak uygun değildir. Bunun yerine, aynı anda birden fazla ekseni hareket ettirebilen Makine Komutu kullanın.
-
Diğer durumlar için:
-
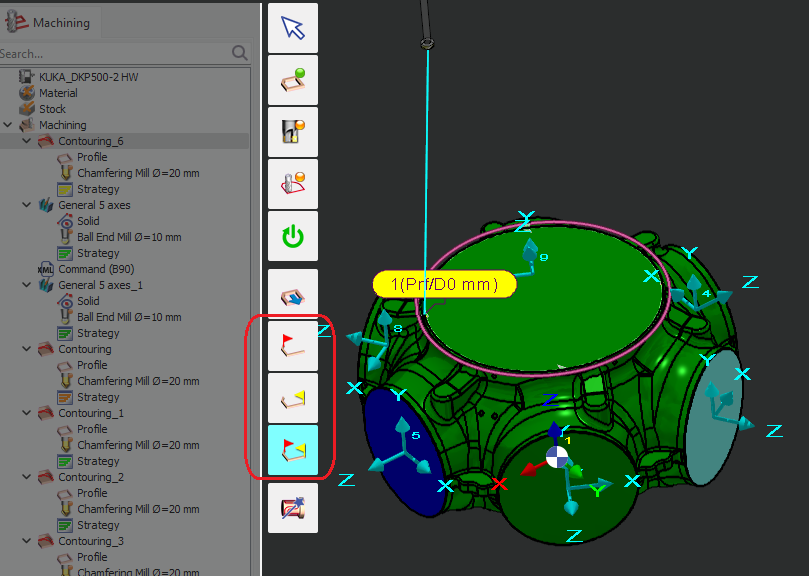
Döngünün robot stratejisini değiştirin.
-
Robot referans konumunu değiştirin.
-
Yeni bir robot yolunu test etmek için robotu veya parçayı yeniden konumlandırın.
-
…
-