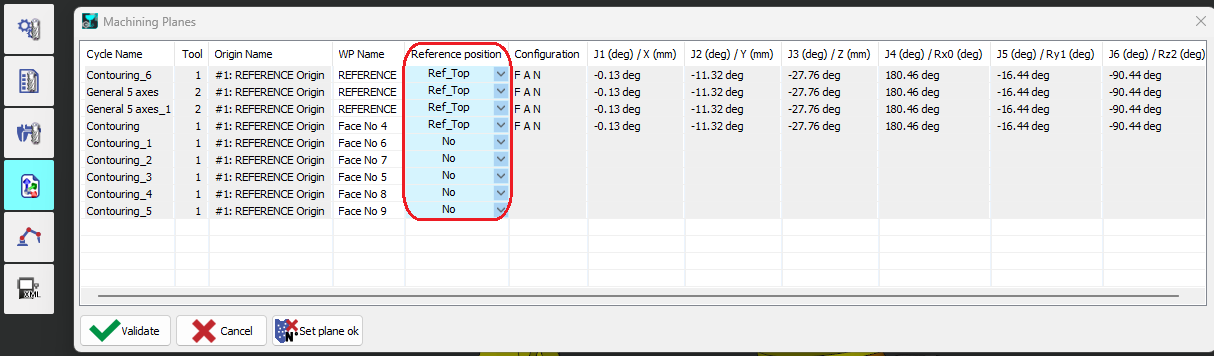
부분적으로 정의되지 않은 방향의 공구 경로를 모호함 없이 로봇 조인트 위치로 변환하려면 기준 위치 이 필요합니다. 여기서 다음을 추출합니다:
-
로봇 기준 구성 → 사이클 전체에서 유지됩니다.
-
로봇 기준 조인트 각도 → 생성된 첫 번째 로봇 위치는 이에 맞게 조정됩니다(특히 J4 및 J6의 조인트 회전을 결정하기 위해).
-
기준 TCP 방향 → 리드인 공구 방향을 정의하는 데 사용됩니다.
기준 위치는 다음과 같이 정의할 수 있습니다:
-
조인트 형식(로봇별) → 순기구학을 통해 계산된 공구 방향.
-
구성(다른 로봇 암에 대해 일반적이고 재사용 가능)이 있는 데카르트 형식 → 역기구학을 통해 계산된 조인트 위치.
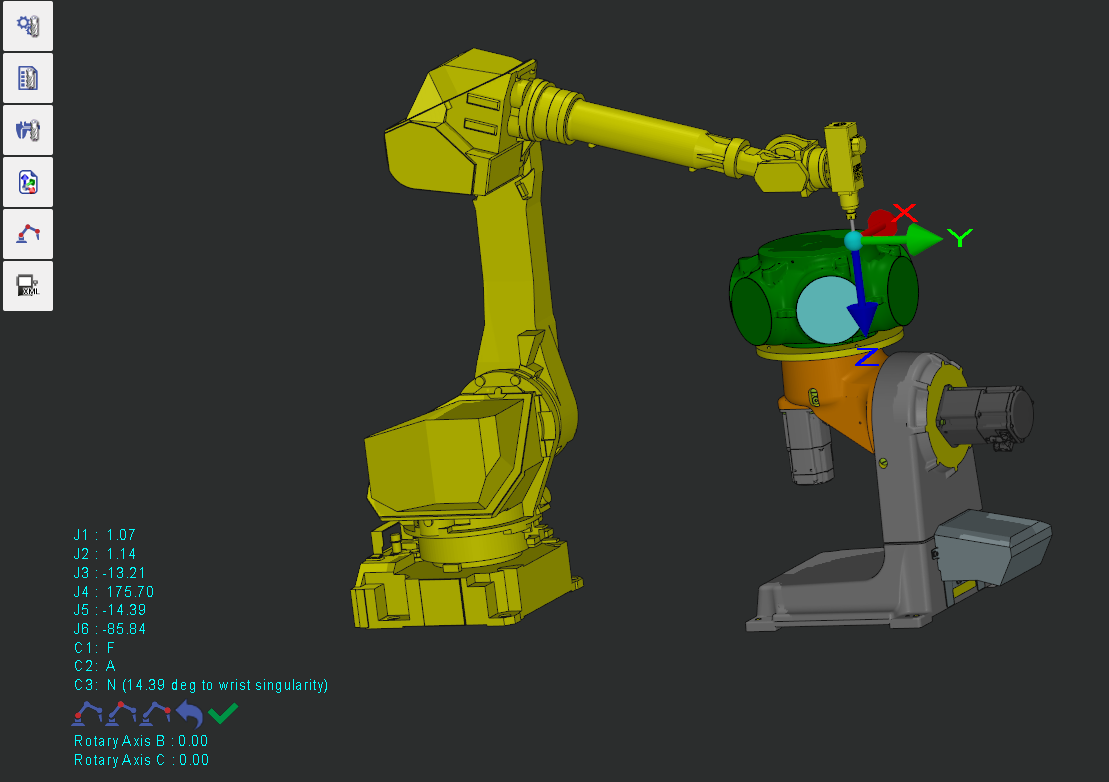
로봇 기준 위치 생성하기
-
형식 선택 (조인트 또는 데카르트).

-
에서 툴링 , 로봇을 배치하려면 부품을 두 번 클릭하십시오.
-
사용 가능한 도구를 사용하여 구성을 전환(어깨-팔꿈치-손목), 공구 방향을 정렬하고, 이동(드래그하거나 거리를 입력하여)하거나 회전(드래그하거나 각도를 입력하여)합니다.
-
-
이름을 지정하고 저장하십시오. 기준 위치.
-
할당 생성된 기준 위치를 가공 작업에 할당합니다(선택 사항).
-
기준 위치가 할당되지 않은 경우 사이클 전에 로봇의 현재 위치가 사용됩니다.
-