This page refers to the robot strategy dialog in 버전 6.12.207.
호출 :
사이클의 공구 경로는 미리 계산됩니다. 공구 경로의 각 지점에 대해 다음 데이터가 제공됩니다.
-
지점 위치
-
Z축 방향(X축과 Y축은 정의되지 않음)
6축 산업용 로봇과 기존 NC 기계의 차이점
-
중복 구성:
어깨에 2개, 팔꿈치에 2개, 손목에 2개 → 총 8개의 가능한 구성. -
중복 회전(특히 J4 및 J6에서):
동일한 직교 경로는 J6이 입력되면서 실행될 수 있습니다. [-180°, 180°] 또는 [180°, 540°] . -
TCP(공구 중심점)의 중복 방향:
6축 산업용 로봇은 완전히 정의된 공구 방향을 제공합니다. X축과 Y축이 미리 정의되지 않은 경우 가능한 방향은 무한대입니다.
참조 위치 필요
부분적으로 정의되지 않은 방향을 가진 공구 경로를 모호함 없이 로봇 조인트 위치로 변환하려면 참조 위치 가 필요합니다. 여기에서 다음을 추출합니다.
-
로봇 참조 구성 (사이클 전체에서 유지됩니다).
-
로봇 참조 조인트 각도 , 첫 번째 생성된 로봇 위치가 이에 맞게 조정됩니다(특히 J4 및 J6에서 조인트 회전을 결정하기 위해).
-
참조 TCP 방향 , 리드인 공구 방향을 정의하는 데 사용됩니다.
참조 위치는 다음과 같이 정의할 수 있습니다.
-
조인트 형식(로봇별) → 순기구학을 통한 공구 방향,
-
구성(일반)을 사용한 직교 형식 → 역기구학을 통한 조인트 위치.
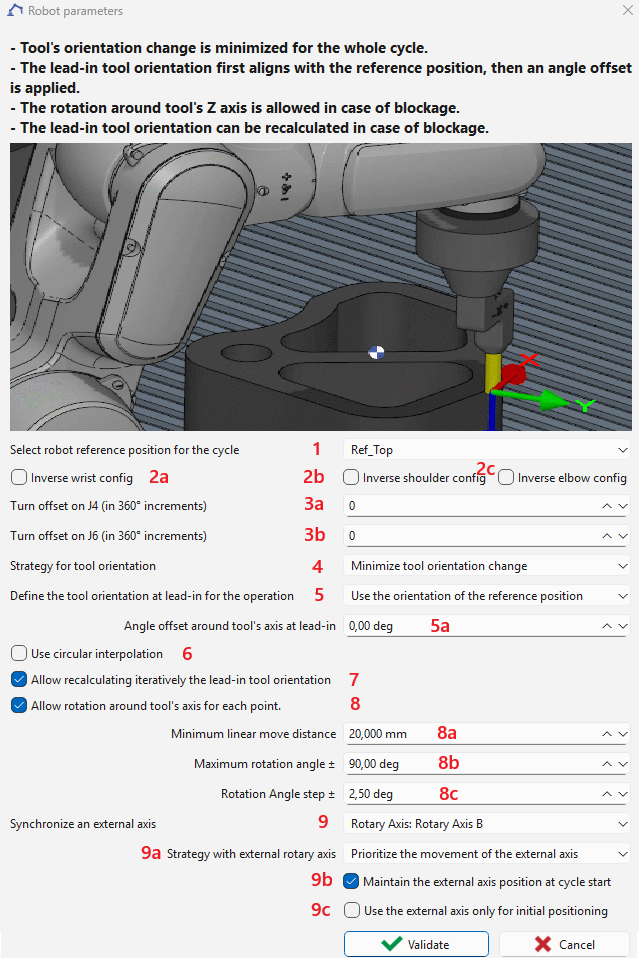
로봇 참조 위치( 1 )
참조 위치를 선택할 수 있습니다. 기본적으로 사이클 이전의 로봇 위치가 사용됩니다. 이 참조 위치는 다음에 사용됩니다.
-
유지되는 어깨-팔꿈치-손목 구성 를 정의합니다(옵션 2a , 2b , 2c ).
-
를 정의합니다. 참조 조인트 각도 위치 , 첫 번째 생성된 조인트 위치가 가능한 한 이에 가깝게 사용됩니다. 이렇게 하면 여러 회전이 있는 축(일반적으로 J4 및 J6, 때로는 무한대)의 모호성을 방지할 수 있습니다. 추가 회전 조정은 3a 및 3b .
-
를 제안합니다(휴대용 공구의 경우). 그런 다음 리드인 공구 방향은 다음과 같습니다. 참조 TCP 방향 5a
-
)만큼 회전하거나, 이 참조 방향에 맞춰 오프셋 각도( 5b
-
에 따라 고정 오프셋 각도( 옵션 )로 공구 경로의 접선에 맞춰 정렬됩니다. 5 .
-

공구 방향 관리( 4 )
-
두 가지 모드를 사용할 수 있습니다.
-
공구 방향 변경 최소화 축 대칭 공구의 경우
-
방향은 가능한 한 안정적으로 유지됩니다.
-
필요한 경우 옵션 8을 활성화하면 이 규칙을 무시할 수 있습니다.
-
-
오프셋으로 공구 경로 접선 따르기 블레이드와 같은 비축 대칭 공구의 경우
-
-
연속 이동(선형 또는 원형)이 도달 가능성, 조인트 제한 또는 특이성으로 인해 실패하는 경우 방향 변경 최소화 모드에서 옵션 8 을 활성화하면 TCP를 Z축 주위로 회전하여 경로를 실행 가능하게 만들 수 있습니다.
-
단점: 이렇게 하면 작은 거리에서 큰 회전이 발생하여 바람직하지 않은 효과(예: 디버링 시 과절삭)가 발생할 수 있습니다. 옵션 8a 및 8b 는 이를 방지하는 데 도움이 됩니다.
-
-
접근, 복귀 또는 반환 지점(공구가 부품과 접촉하지 않는 경우)의 경우 두 모드 모두에서 회전이 항상 허용됩니다.
외부 축( 9 )
추가 외부 축을 정의할 수 있습니다.
-
로봇을 이동하는 선형 축 , 로봇 조인트 축과 동기화할 수 있습니다.
-
부품을 이동하는 회전 축 , 로봇 조인트 축과 동기화할 수 있습니다.
-
로봇 플랜지에 부착된 선형 축 , TCP의 Z축을 따라 공구를 이동하며 드릴링, 태핑 또는 나사산 사이클에만 선택할 수 있습니다. 이 축은 로봇 조인트 축과 동기화할 수 없습니다. ).

이 대화 상자에서 선택하고 로봇 축과 동기화하려면 축에 0이 아닌 식별자가 있어야 합니다.
외부 축 동기화의 경우 추가 옵션 9a , 9b 및 9c 를 사용할 수 있습니다.
9a — 7번째 축과의 동기화 전략
로봇과 7번째 축 사이의 동기화 전략을 선택할 수 있습니다.
-
7번째 축 모션 우선 순위 지정 :
7번째 축 이동은 외부 축과 관련된 선택한 참조 위치에 의해 정의된 종방향 위치에 가능한 한 가깝게 로봇을 유지하기 위해 우선 순위가 지정됩니다. -
공구 방향 변경 최소화 :
시스템은 동기화된 모션 동안 공구 방향(참조에 의해 정의된 공구 프레임의 Z축)의 변화를 최소화합니다.
9b — 리드인 위치 전략
시스템이 리드인 참조 위치에 도달하는 방식을 선택할 수 있습니다.
-
로봇 전용 접근 방식 :
로봇은 외부 축이 고정된 상태에서 참조 위치로 이동합니다. -
동기화된 접근 방식 :
로봇과 외부 축이 모두 선택한 참조 위치에 도달하기 위해 동시에 이동합니다.
9c — 경로 실행 모드
후속 경로가 실행되는 방식을 정의할 수 있습니다.
-
로봇과 외부 축 모두에 의해 , 동기화된 모션을 허용하거나,
-
로봇에 의해서만 , 경로 실행 중에 외부 축이 고정된 상태로 유지됩니다. 이 모드에서 외부 축은 접근 위치 지정에만 사용되며 경로 동안 조정된 모션에 참여하지 않습니다.
추가 옵션
-
2a , 2b , 2c : Invert shoulder, elbow, or wrist configuration.
-
3a , 3b : Apply a turn offset to J4 or J6.
-
예: J6이 [-720°, 720°]로 제한되고 사이클 전 값이 680°(상한에 가까움)인 경우 -1의 회전 오프셋을 적용하면 참조 J6이 320°(680° – 360°)로 변경됩니다.
-
-
5 : Select method for lead-in orientation.
-
6 : Activate circular interpolation.
-
7 : 사이클이 실패하면 GO2robot은 8c 에 정의된 각도 단계로 유효한 리드인 방향을 반복적으로 검색합니다. 성공하면 값 이 참조 방향에 맞춰 오프셋 각도( 또는 옵션 이 새 매개변수로 업데이트됩니다.
-
8: enable tool orientation change in mode Minimize tool orientation change . 8a , 8b : Additional constraints to avoid excessive orientation changes.