왜 로봇인가?
|
로봇 기술의 발전, 생산 품질 향상, 기계 효율성 향상, 산업화 증가로 인해 글로벌 CAM 시장이 빠르게 성장하고 있습니다. 로봇은 연중무휴 24시간 운영, 50미크론 미만의 정밀도로 뛰어난 반복성, 시간이 지남에 따라 높은 투자 수익률(ROI)을 제공합니다. 로봇은 산업 4.0, 머신 러닝, AI를 발전시키고 다양한 산업 분야에서 혁신을 주도하고 생산성을 향상시키는 데 매우 중요합니다. |
로봇 오프라인 프로그래밍(OLP)
|
전통적으로 로봇은 수동으로 로봇을 작업으로 안내하는 휴대용 장치인 티치 펜던트를 사용하여 가르칩니다. 이 방법은 번거롭고 위험하며 시간이 많이 걸릴 수 있습니다. 오프라인 로봇 프로그래밍(OLP)을 통해 작업자는 디지털 3D 모델을 사용하여 원격으로 작업하여 로봇 경로를 생성하고 검증한 다음 로봇에 업로드할 수 있습니다. 이렇게 하면 수동 교육이 줄어들고 안전성이 향상되며 효율성이 향상됩니다. ROP의 장점:
|

|
GO2cam Robot의 기술적 특징
|
GO2CAM은 로봇 운동학 계산을 위한 강력한 수학 엔진을 통해 OLP를 구현할 수 있는 모든 인프라를 갖추고 있습니다. GO2CAM의 목표는 로봇 프로그래밍의 어려움의 대부분을 소프트웨어 내에 유지하고 고객이 밀링 머신만큼 로봇을 쉽게 사용할 수 있도록 하는 것입니다. GO2cam의 ROP는 다음과 같은 경우에 적용할 수 있습니다. |
||
|
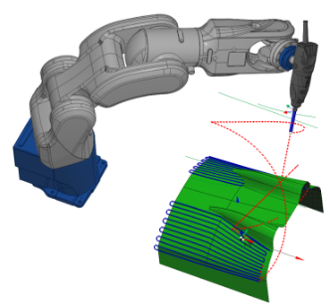
> 로봇이 연속 경로를 따라야 하는 작업의 경우, 작업 흐름은 공작 기계와 거의 동일합니다.
|
|
|
|
> 로봇이 여러 웨이포인트를 통과하기만 하면 되는 작업의 경우, 대화형 인터페이스를 사용하여 전체 경로를 계획합니다.
|

|
|
|
소프트웨어는 거의 모든 직렬 6축 로봇을 처리할 수 있습니다. |
|
|
|
유형 1: 대부분의 산업용 6축 로봇으로, 마지막 3축이 한 점에서 교차합니다. 
|
유형 2: 2, 3, 4축이 평행한 대부분의 협업 로봇. 
|
유형 3: 마지막 3축이 한 점에서 교차하지 않는다는 점을 제외하고 유형 1과 유사합니다(Fanuc CRX). 
|
GO2cam에서 로봇을 프로그래밍하는 단계는 주로 다음과 같습니다.
-
다른 로봇 셀에 재사용할 수 있는 부품의 CAM.
-
다른 부품에 재사용할 수 있는 로봇 셀 설계.
-
로봇 가공 전략 설정
-
시뮬레이션 및 충돌 감지
-
PP 및 테크노 기능 설정
-
로봇 프로그램 생성