-
워크스테이션은 일반적으로 로봇 팔뿐만 아니라 더 많은 장치(격리 셀, 외부 축 등)를 포함합니다.
-
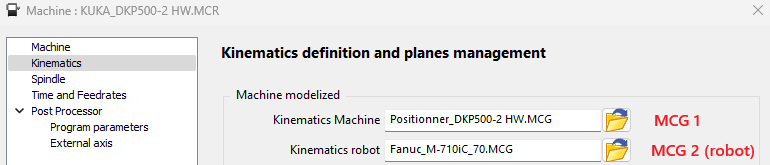
권장 사항: 사용 2 machines (MCGs)
-
MCG 1 = main machine cell (with 외부 요소 포지션 추가하기 ).
-
MCG 2 = 로봇 팔만 해당.
-
2대의 머신 장점:
-
로봇 팔을 쉽게 교체하면서 메인 셀을 유지합니다 ( MCG 1 ).
-
로봇 베이스는 부품/공구에 맞게 재배치할 수 있습니다 (머신 트리에서 로봇 베이스를 더블 클릭).

-
로봇 팔만 필요한 경우
-
MCG 1 = 로봇 팔.
-
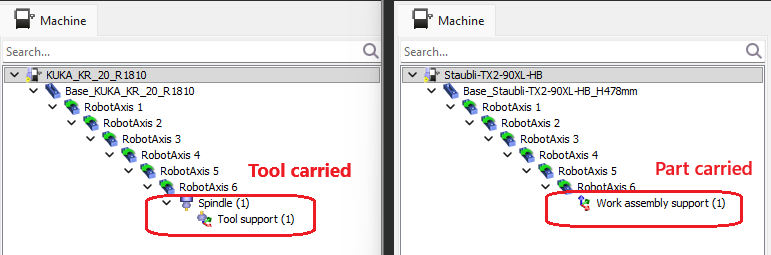
공구 또는 공작물에 대한 지지대는 항상 로봇 플랜지(RobotAxis 6)에 부착되어야 합니다. 다른 지지대는 MCG 1 또는 MCG 2에서 정의할 수 있습니다.
-
공구 서포트 로봇 플랜지에서 = 공구 운반.
-
공작물 서포트 로봇 플랜지에서 = 부품 운반.
도달 가능성 사전 점검
-
툴링에서 부품의 모든 지점을 더블 클릭 → 도달 가능성 미리보기를 위해 로봇이 자동으로 배치됩니다.