제거할 상당한 재료가 없으면 파트와 동일한 형상으로 스톡을 설정하는 것이 좋습니다. 이렇게 하려면 파트를 복제하여 스톡으로 할당합니다.
모의가공 충돌 검사 활성화됨 . 충돌이 발생할 경우 충돌을 피하기 위해 여러 옵션을 사용할 수 있습니다:
-
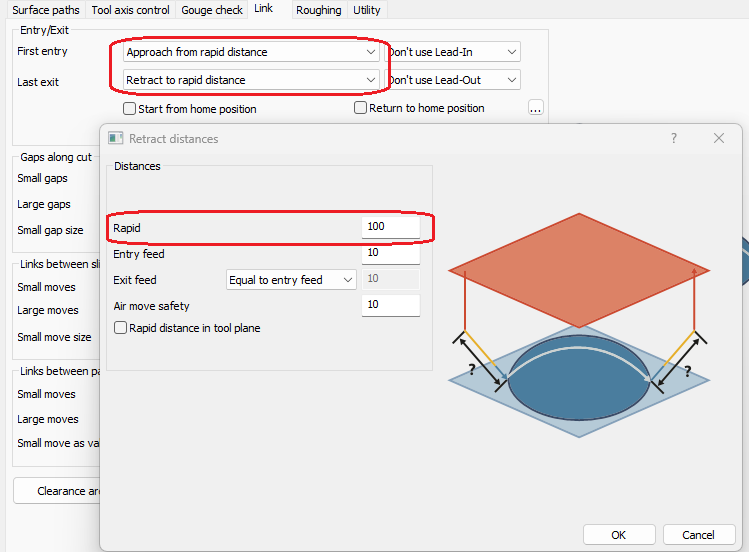
만약 사이클의 진입점 또는 복귀점에서 충돌이 발생하면:
-
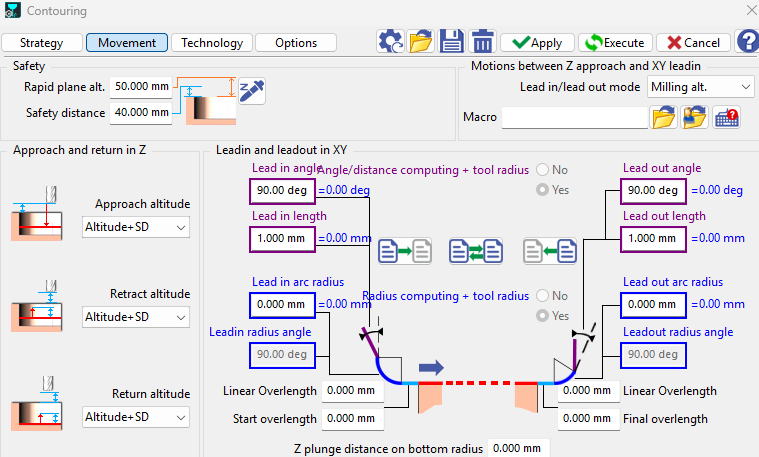
리셋 어프로치/리턴 파라메터 (예: 거리).
-
추가 진입/복귀점.
-
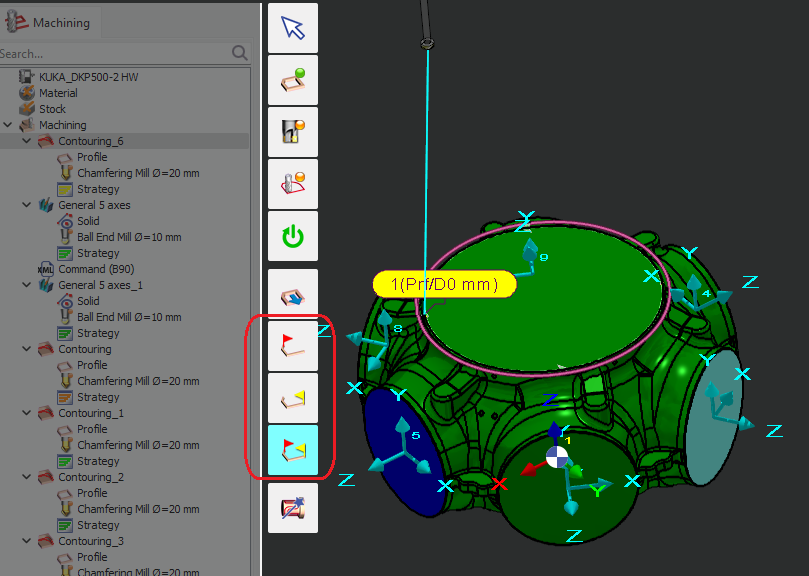
Create and insert a 기준 관절 위치로 관절 각도 변경을 최소화합니다 move before or after the cycle.
-
로봇 직선 이동을 불필요하게 사용하지 마십시오 , 특이점의 위험을 피하기 위해.
-
Recommendation: 메쏘드 오버랩 a or b , as they modify the cycle itself, which can then be reused for other robots (e.g., in an Opelist).
-
-
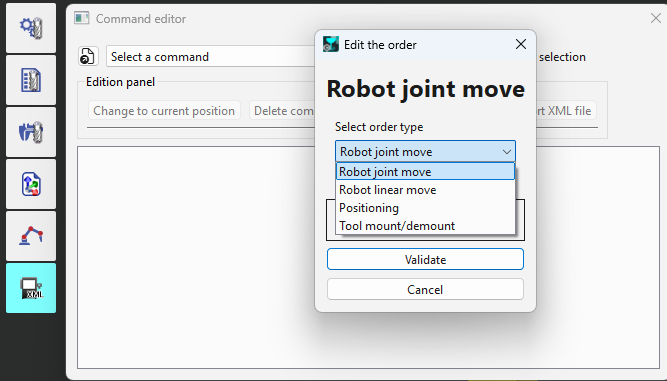
기계 명령에 대해 로봇이 아닌 축을 선택 가능하게 하려면 위치 , 그것은 다음과 같이 정의되어야 합니다. 프로그램 측정 .
사용하는 것이 권장되지 않습니다 컴포넌트 이동 GO2cam Robots. 기준 관절 위치로 관절 각도 변경을 최소화합니다 , 여러 축을 동시에 이동할 수 있습니다.
-
For other cases:
-
사이클의 로봇 전략 변경.
-
로봇 Reference 위치 수정
-
로봇 또는 부품의 위치를 변경하여 새로운 로봇 경로를 테스트합니다.
-
…
-