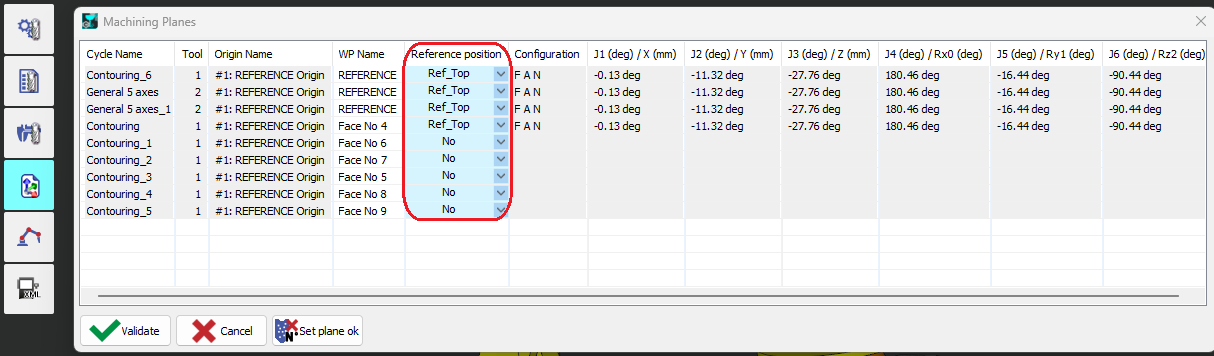
Per convertire un percorso utensile con orientamento parzialmente indefinito in posizioni articolari del robot senza ambiguità, è necessaria una posizione di riferimento . Da esso estraiamo:
-
Configurazione di riferimento del robot → mantenuta durante tutto il ciclo.
-
Angoli articolari di riferimento del robot → la prima posizione del robot generata verrà adattata a questi (per determinare le rotazioni articolari, in particolare J4 e J6).
-
Orientamento TCP di riferimento → utilizzato per definire l'orientamento dell'utensile di ingresso.
La posizione di riferimento può essere definita come:
-
Formato articolare (specifico del robot) → orientamento dell'utensile calcolato tramite cinematica diretta.
-
Formato cartesiano con configurazione (generico e riutilizzabile per altri bracci robotici) → posizioni articolari calcolate tramite cinematica inversa.
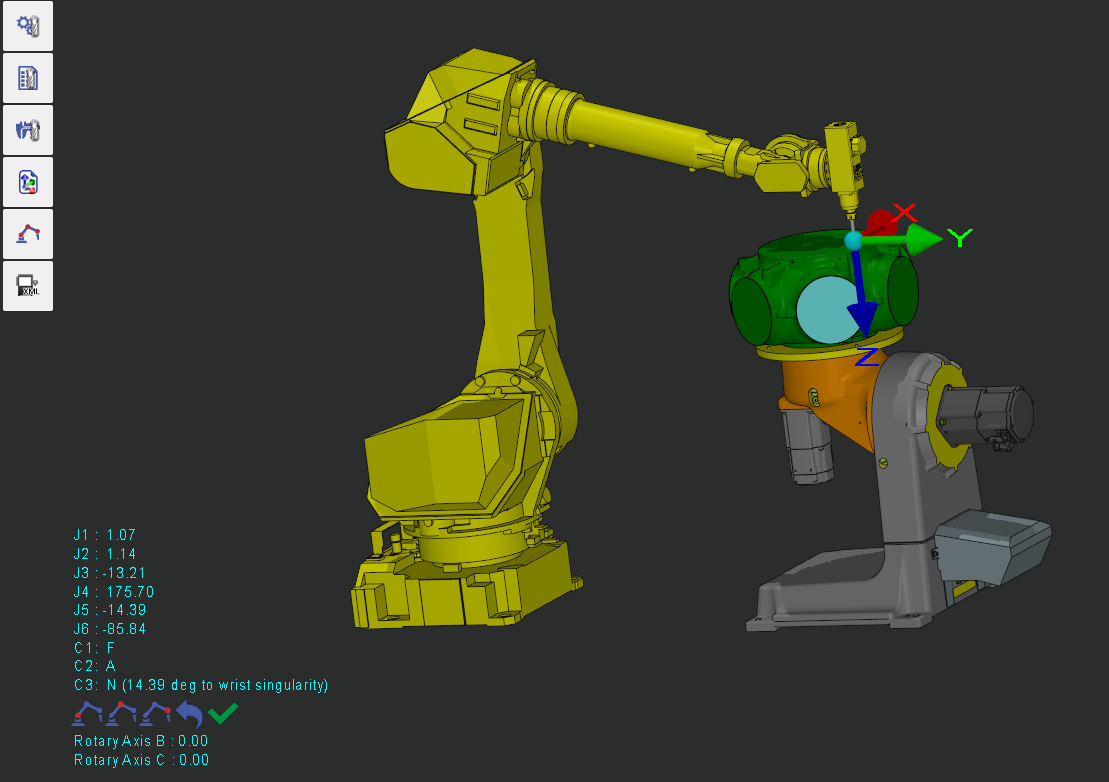
Creazione di una posizione di riferimento del robot
-
Seleziona il formato (Articolare o Cartesiano).

-
In Utensili , fare doppio clic sulla parte per posizionare il robot.
-
Utilizzare gli strumenti disponibili per cambiare configurazione (spalla–gomito–polso), allineare l'orientamento dell'utensile, traslare (trascinando o inserendo una distanza) o ruotare (trascinando o inserendo un angolo).
-
-
Nome e salva la posizione di riferimento.
-
Assegna la posizione di riferimento creata alle operazioni di lavorazione (opzionale).
-
Se non viene assegnata alcuna posizione di riferimento, verrà utilizzata la posizione corrente del robot prima del ciclo.
-