-
Una postazione di lavoro di solito include più dispositivi (cella di isolamento, assi esterni, ecc.) oltre al braccio del robot.
-
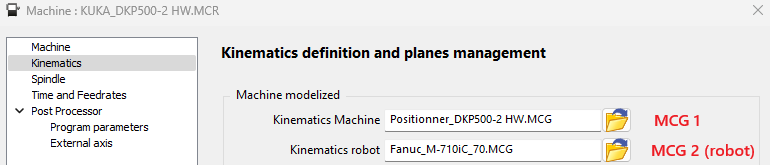
Consigliato: usa 2 macchine (MCG)
-
MCG 1 = cella macchina principale (con Aggiungi una posizione dell'elemento esterno ).
-
MCG 2 = solo braccio robot.
-
Vantaggi con 2 macchine:
-
Facile da sostituire il braccio del robot mantenendo la cella principale ( MCG 1 ).
-
La base del robot può essere riposizionata (fare doppio clic sulla base del robot nell'albero della macchina) per adattarsi al pezzo/utensile.
-
Se è necessario solo il braccio del robot
-
MCG 1 = braccio robot.
-
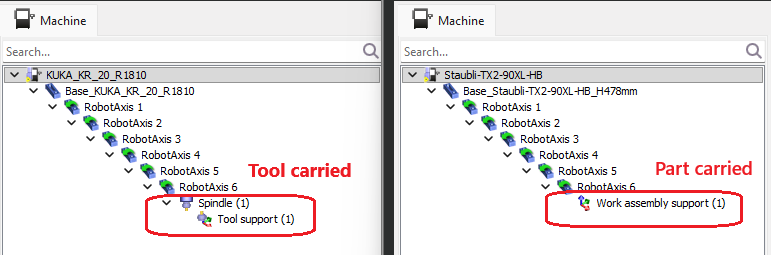
Un supporto, per l'utensile o per il pezzo, deve essere sempre collegato alla flangia del robot (RobotAxis 6). L'altro supporto può essere definito in MCG 1 o MCG 2.
-
Supporto utensile sulla flangia del robot = trasportato dall'utensile.
-
Pezzo supporto sulla flangia del robot = trasportato dal pezzo.
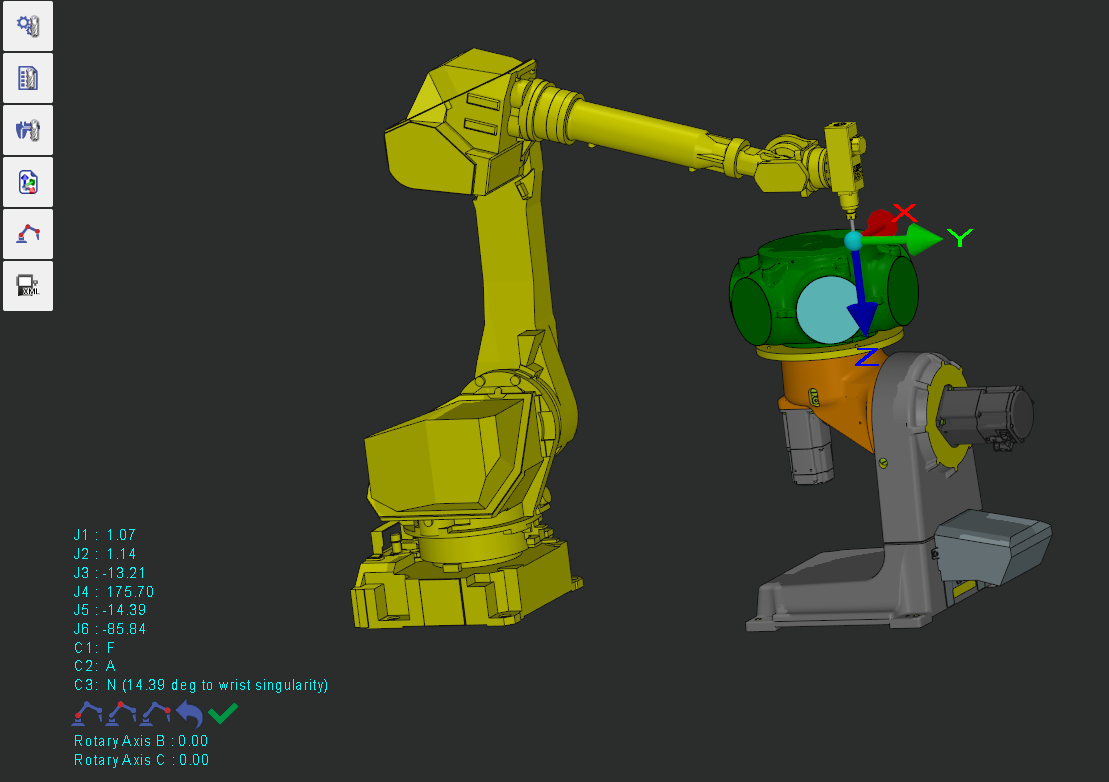
Controllo preliminare della raggiungibilità
-
In utensileria, fare doppio clic su qualsiasi punto del pezzo → il robot si posiziona automaticamente lì per l'anteprima della raggiungibilità.