Perché i robot?
|
Il mercato globale della CAM è in rapida crescita grazie ai progressi delle tecnologie robotiche, al miglioramento della qualità della produzione, all'aumento dell'efficienza delle macchine e all'aumento dell'industrializzazione. I robot offrono un funzionamento 24 ore su 24, 7 giorni su 7, un'eccezionale ripetibilità con una precisione spesso inferiore a 50 micron e un elevato ritorno sull'investimento (ROI) nel tempo. Sono fondamentali per far progredire l'Industria 4.0, l'apprendimento automatico e l'IA, guidando l'innovazione e migliorando la produttività in vari settori. |
Programmazione robot offline (OLP)
|
Tradizionalmente, i robot vengono insegnati utilizzando un Teach Pendant, un dispositivo portatile che guida manualmente il robot attraverso le attività. Questo metodo può essere ingombrante, rischioso e dispendioso in termini di tempo. La programmazione robot offline (OLP) consente agli operatori di lavorare da remoto con modelli 3D digitali per generare e convalidare i percorsi dei robot prima di caricarli sul robot. Ciò riduce l'insegnamento manuale, migliora la sicurezza e aumenta l'efficienza. Vantaggi di ROP:
|

|
Caratteristiche tecniche di GO2cam Robot
|
GO2CAM ha tutta l'infrastruttura per implementare OLP con un potente motore matematico per il calcolo della cinematica del robot. L'obiettivo di GO2CAM è mantenere la maggior parte della difficoltà della programmazione del robot all'interno del software e rendere un robot facile da usare come una fresatrice per il cliente. Il ROP in GO2cam è applicabile: |
||
|
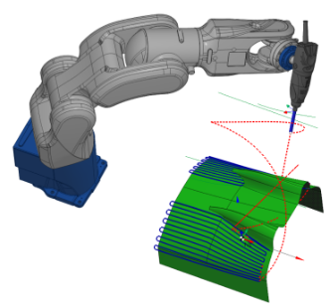
> Per le attività per le quali il robot deve seguire un percorso continuo, il flusso di lavoro è quasi lo stesso di quello per la macchina utensile
|
|
|
|
> Per le attività per le quali il robot deve solo passare attraverso diversi waypoint, viene utilizzata un'interfaccia interattiva per pianificare l'intero percorso
|

|
|
|
Il software può trattare quasi tutti i robot seriali a 6 assi: |
|
|
|
Tipo 1: Per lo più tutti i robot industriali a 6 assi in cui gli ultimi 3 assi si intersecano su un punto 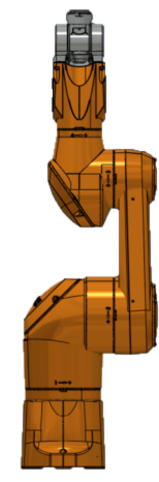
|
Tipo 2: La maggior parte dei robot collaborativi in cui il 2°, 3° e 4° asse sono paralleli 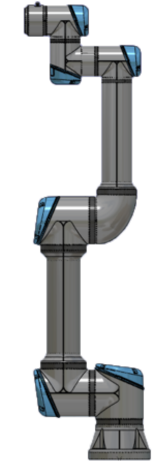
|
Tipo 3: Come il tipo 1, tranne per il fatto che gli ultimi tre assi non si intersecano su un punto (Fanuc CRX) 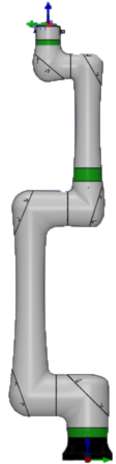
|
I passaggi per programmare i robot in GO2cam sono principalmente i seguenti:
-
CAM della parte, che può essere riutilizzato per altre celle robot.
-
Progettazione della cella robot, che può essere riutilizzata per altre parti.
-
Impostazione della strategia di lavorazione del robot
-
Simulazione e rilevamento delle collisioni
-
Impostazione delle funzioni PP e tecno
-
Generazione del programma del robot