Se non c'è materiale significativo da rimuovere, si consiglia di impostare il grezzo con la stessa geometria del pezzo. Per fare ciò, duplicare il pezzo e assegnarlo come grezzo.
Esegui la simulazione con controllo collisioni abilitato . Sono disponibili diverse opzioni per evitare collisioni in caso di verificarsi:
-
Se si verificano collisioni nei punti di approccio o di ritorno di un ciclo:
-
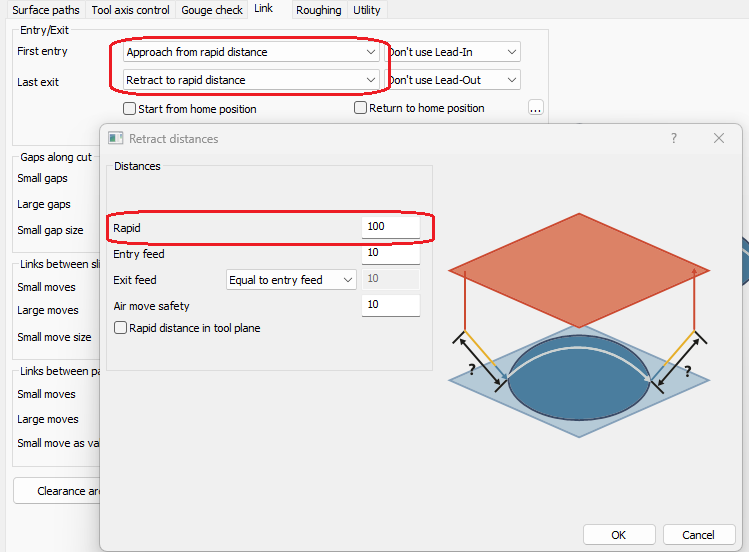
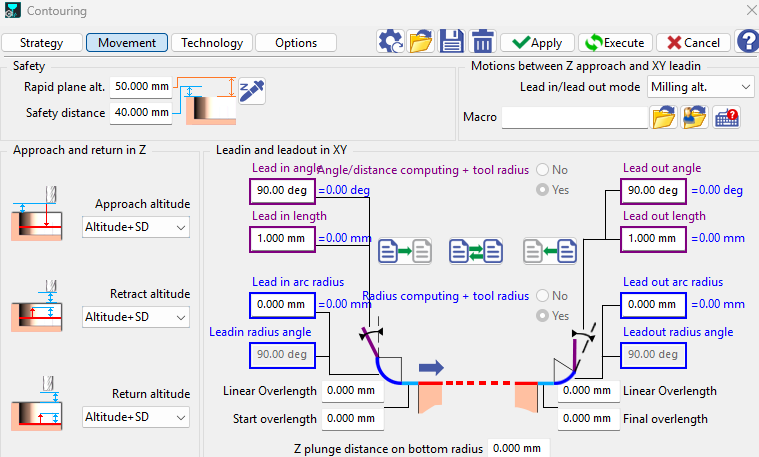
Reimpostare i parametri di approccio/ritorno (ad esempio, la distanza).
-
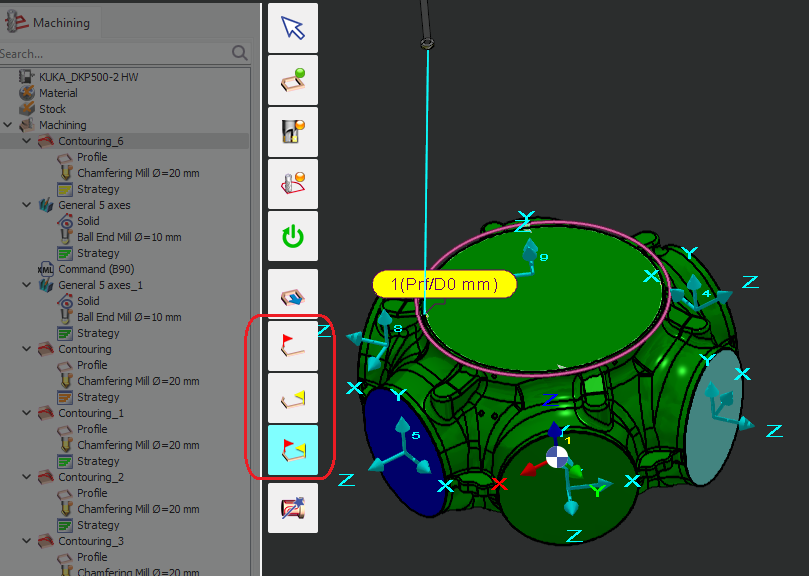
Aggiungere punti di approccio/ritorno aggiuntivi.
-
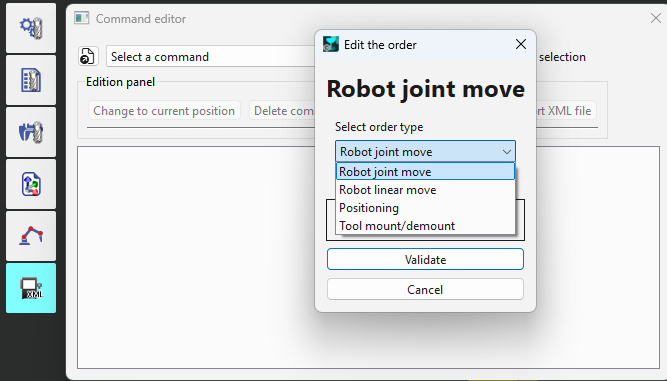
Create and insert a Machine Command move before or after the cycle.
-
Non utilizzare un movimento lineare del robot se non necessario , per evitare il rischio di singolarità.
-
Raccomandazione: Preferisci i metodi a o b , poiché modificano il ciclo stesso, che può quindi essere riutilizzato per altri robot (ad esempio, in un Opelist).
-
-
Per rendere un asse non robot selezionabile per Machine Command Posizionamento , deve essere definito come programmabile .
Non è consigliabile utilizzare MOVE_COMPONENT in GO2Robot. Innanzitutto, un singolo comando MOVE_COMPONENT sposta un solo asse; per spostare un robot a 6 assi sarebbero necessari sei comandi MOVE_COMPONENT separati e i movimenti non sarebbero sincronizzati. In secondo luogo, non è appropriato emettere file CN per i robot. Invece, usa il Machine Command , che può spostare più assi contemporaneamente.
-
Per altri casi:
-
Cambia la strategia del robot del ciclo.
-
Modificare la posizione di riferimento del robot.
-
Riposizionare il robot o il pezzo per testare un nuovo percorso del robot.
-
…
-