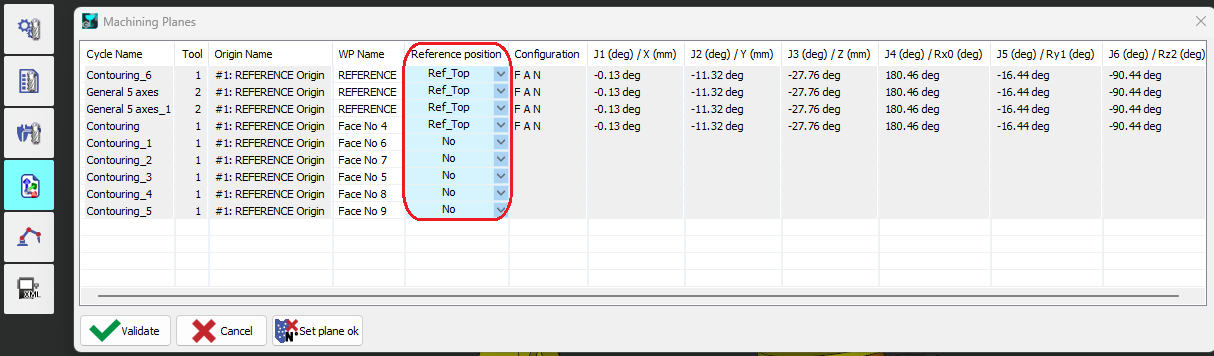
Pour convertir un trajet avec une orientation partiellement non définie en positions articulaires de robot sans ambiguïté, une position de référence est requise. À partir de celle-ci, nous extrayons :
-
Configuration de référence du robot → maintenue tout au long du cycle.
-
Angles articulaires de référence du robot → la première position de robot générée sera ajustée à ceux-ci (pour déterminer les tours articulaires, en particulier J4 et J6).
-
Orientation TCP de référence → utilisée pour définir l'orientation de l'outil d'entrée.
La position de référence peut être définie comme :
-
Format articulaire (spécifique au robot) → orientation de l'outil calculée via la cinématique directe.
-
Format cartésien avec configuration (générique et réutilisable pour d'autres bras de robot) → positions articulaires calculées via la cinématique inverse.
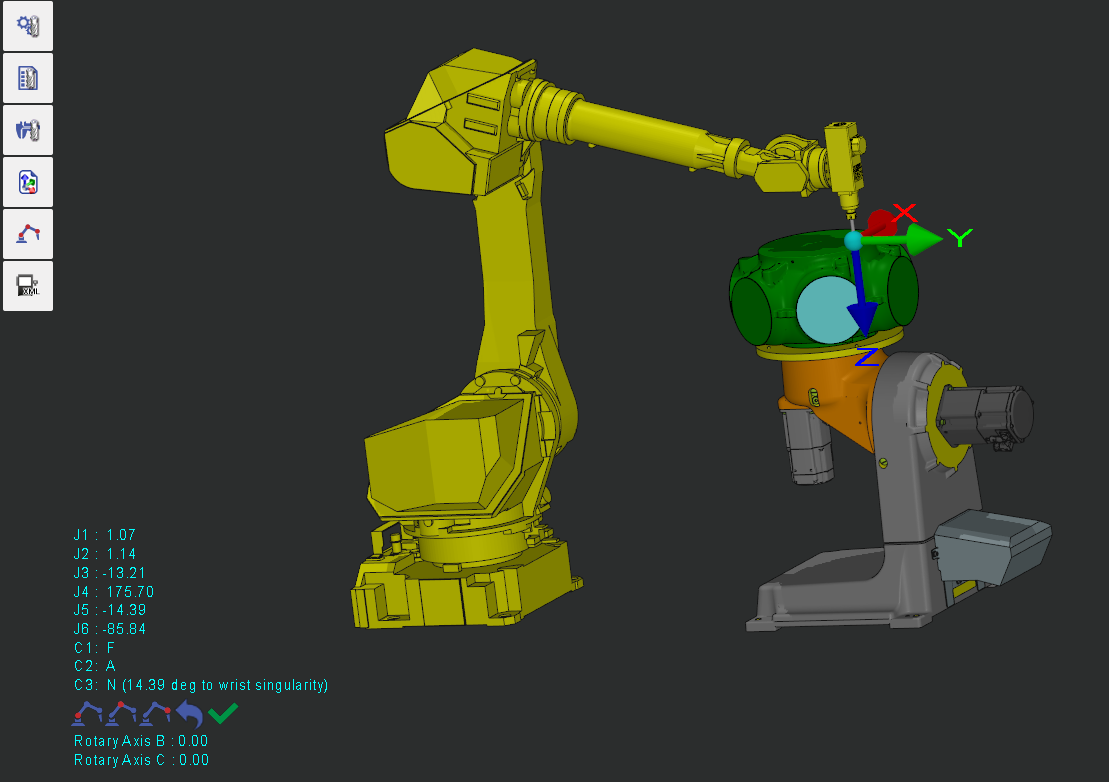
Création d'une position de référence du robot
-
Sélectionnez le format (Articulaire ou Cartésien).

-
Dans Outillage , double-cliquez sur la pièce pour positionner le robot.
-
Utilisez les outils disponibles pour changer de configuration (épaule–coude–poignet), aligner l'orientation de l'outil, translater (en faisant glisser ou en entrant une distance) ou faire pivoter (en faisant glisser ou en entrant un angle).
-
-
Nommez et enregistrez la position de référence.
-
Affectez la position de référence créée aux opérations d'usinage (facultatif).
-
Si aucune position de référence n'est affectée, la position actuelle du robot avant le cycle sera utilisée.
-