This page refers to the robot strategy dialog in version 6.12.207.
Rappel :
Le trajet de l'outil du cycle est calculé au préalable. Pour chaque point du trajet, les données suivantes sont fournies :
-
Emplacement du point
-
Orientation de l'axe Z (les axes X et Y restent non définis)
Différences entre les robots industriels à 6 axes et les machines-outils CN traditionnelles
-
Configurations redondantes :
2 pour l'épaule, 2 pour le coude et 2 pour le poignet → total de 8 configurations possibles. -
Tours redondants (en particulier sur J4 et J6) :
Le même trajet cartésien peut être exécuté avec J6 entrant [-180°, 180°] ou [180°, 540°] . -
Orientations redondantes du TCP (point central de l'outil) :
Les robots industriels à 6 axes fournissent une orientation d'outil entièrement définie. Si les axes X et Y ne sont pas définis au préalable, les orientations possibles sont infinies.
Nécessité d'une position de référence
Pour convertir un trajet d'outil avec une orientation partiellement non définie en positions articulaires de robot sans ambiguïté, un position de référence est requis. De celui-ci, nous extrayons :
-
Configuration de référence du robot (conservée tout au long du cycle).
-
Angles articulaires de référence du robot , auxquels la première position de robot générée sera ajustée (pour déterminer les tours articulaires, en particulier J4 et J6).
-
Orientation TCP de référence , utilisée pour définir l'orientation de l'outil d'entrée.
La position de référence peut être définie comme :
-
Format articulaire (spécifique au robot) → orientation de l'outil via la cinématique directe,
-
Format cartésien avec configuration (générique) → positions articulaires via la cinématique inverse.
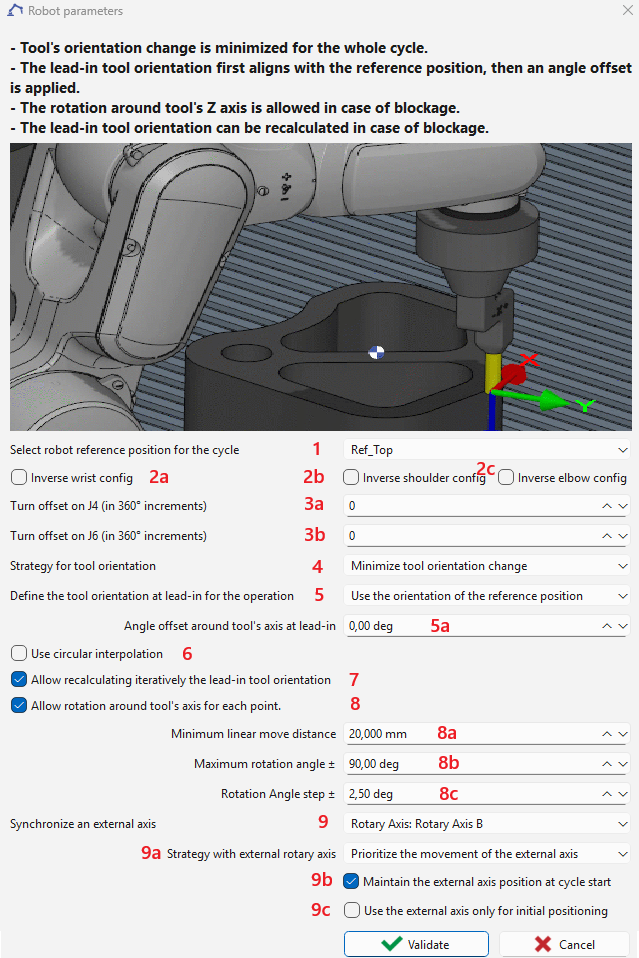
Position de référence du robot ( 1 )
La position de référence peut être sélectionnée. Par défaut, la position du robot avant le cycle est utilisée. Cette position de référence est utilisée pour :
-
Définir le configuration épaule-coude-poignet , maintenu tout au long du cycle (peut être inversé par les options 2a , 2b , 2c ).
-
Définir un position angulaire articulaire de référence , utilisé pour que la première position articulaire générée soit aussi proche que possible de celle-ci. Cela évite les ambiguïtés dans les axes avec plusieurs tours (communément J4 et J6, parfois sans fin). D'autres ajustements de tour peuvent être appliqués avec 3a et 3b .
-
Proposer un orientation TCP de référence (en cas d'outil porté). L'orientation de l'outil d'entrée peut alors être :
-
alignée sur cette orientation de référence et tournée d'un angle de décalage ( 5a ), ou
-
alignée sur la tangente du trajet d'outil avec un angle de décalage fixe ( 5b ), selon l'option 5 .
-

Gestion de l'orientation de l'outil ( 4 )
-
Deux modes sont disponibles :
-
Minimiser le changement d'orientation de l'outil pour les outils à symétrie axiale
-
L'orientation est maintenue aussi stable que possible.
-
Si nécessaire, cette règle peut être ignorée lorsque l'option 8 est activée.
-
-
Suivre la tangente du trajet d'outil avec décalage Pour les outils non symétriques par rapport à l'axe, tels qu'une lame
-
-
Si un mouvement continu (linéaire ou circulaire) échoue en raison de la portée, des limites articulaires ou des singularités, alors en mode Minimiser le changement d'orientation , avec l'option 8 activée, le TCP peut être tourné autour de son axe Z pour rendre le trajet réalisable.
-
Inconvénient : Cela peut provoquer de grandes rotations sur de petites distances, entraînant des effets indésirables (par exemple, une surcoupe dans l'ébavurage). Les options 8a et 8b aident à prévenir cela.
-
-
Pour les points d'approche, de retrait ou de retour (où l'outil n'est pas en contact avec la pièce), la rotation est toujours autorisée dans les deux modes.
Axes externes ( 9 )
Un axe externe supplémentaire peut être défini :
-
Axe linéaire déplaçant le robot , peut être synchronisé avec l'axe articulaire du robot.
-
Axe rotatif déplaçant la pièce , peut être synchronisé avec l'axe articulaire du robot.
-
Axe linéaire fixé à la bride du robot , déplaçant l'outil le long de l'axe Z du TCP, sélectionnable uniquement pour les cycles de perçage, de taraudage ou de filetage. Cet axe ne peut pas être synchronisé avec l'axe articulaire du robot ).

L'axe doit avoir un identifiant non nul pour être disponible pour la sélection dans cette boîte de dialogue et pour se synchroniser avec les axes du robot.
Dans le cas de la synchronisation de l'axe externe, des options supplémentaires 9a , 9b et 9c sont disponibles.
9a — Stratégie de synchronisation avec le 7e axe
Vous pouvez sélectionner la stratégie de synchronisation entre le robot et le 7e axe :
-
Privilégier le mouvement du 7e axe :
Le mouvement du 7e axe est priorisé afin de maintenir le robot aussi près que possible de la position longitudinale définie par la position de référence sélectionnée par rapport à l'axe externe. -
Minimiser le changement d'orientation de l'outil :
Le système minimise les variations de l'orientation de l'outil (axe Z du repère de l'outil, tel que défini par la référence) pendant le mouvement synchronisé.
9b — Stratégie de position d'entrée
Vous pouvez choisir comment le système atteint la position de référence d'entrée :
-
Approche robot uniquement :
Le robot se déplace vers la position de référence tandis que l'axe externe reste immobile. -
Approche synchronisée :
Le robot et l'axe externe se déplacent simultanément pour atteindre la position de référence sélectionnée.
9c — Mode d'exécution du trajet
Vous pouvez définir si le trajet suivant est exécuté :
-
Par le robot et l'axe externe , permettant un mouvement synchronisé, ou
-
Par le robot uniquement , l'axe externe restant fixe pendant l'exécution du trajet. Dans ce mode, l'axe externe est utilisé uniquement pour le positionnement d'approche et ne participe pas au mouvement coordonné pendant le trajet.
Options supplémentaires
-
2a , 2b , 2c : Invert shoulder, elbow, or wrist configuration.
-
3a , 3b : Apply a turn offset to J4 or J6.
-
Exemple : Si J6 est limité à [-720°, 720°] et que sa valeur avant le cycle est de 680° (près de la limite supérieure), l'application d'un décalage de tour de -1 modifie le J6 de référence à 320° (680° – 360°).
-
-
5 : Select method for lead-in orientation.
-
6 : Activate circular interpolation.
-
7 : Si le cycle échoue, GO2robot recherche itérativement une orientation d'entrée valide, en utilisant un pas d'angle défini dans 8c . En cas de succès, la valeur 5a ou 5b est mise à jour avec le nouveau paramètre.
-
8: enable tool orientation change in mode Minimize tool orientation change . 8a , 8b : Additional constraints to avoid excessive orientation changes.