-
Une station de travail comprend généralement plus d'appareils (cellule d'isolation, axes externes, etc.) que le simple bras du robot.
-
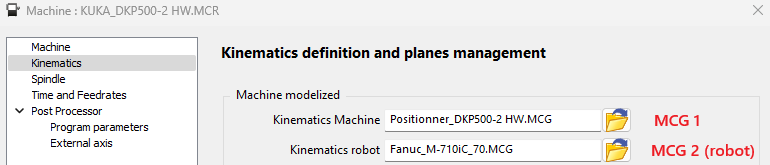
Recommandé : utiliser 2 machines (MCG)
-
MCG 1 = cellule de machine principale (avec position d'élément externe ).
-
MCG 2 = bras de robot uniquement.
-
Avantages avec 2 machines :
-
Facile de remplacer le bras du robot tout en conservant la cellule principale ( MCG 1 ).
-
La base du robot peut être repositionnée (double-cliquez sur la base du robot dans l'arbre de la machine) pour s'adapter à la pièce/l'outil.
-
Si seul le bras du robot est nécessaire
-
MCG 1 = bras du robot.
-
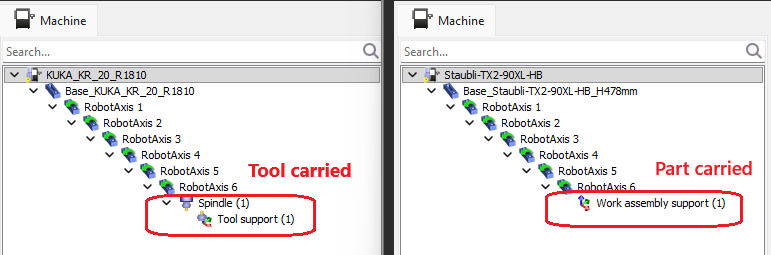
Un support, soit pour l'outil, soit pour la pièce, doit toujours être fixé à la bride du robot (RobotAxis 6). L'autre support peut être défini dans MCG 1 ou MCG 2.
-
Support d'outil sur la bride du robot = porté par l'outil.
-
Pièce support sur la bride du robot = porté par la pièce.
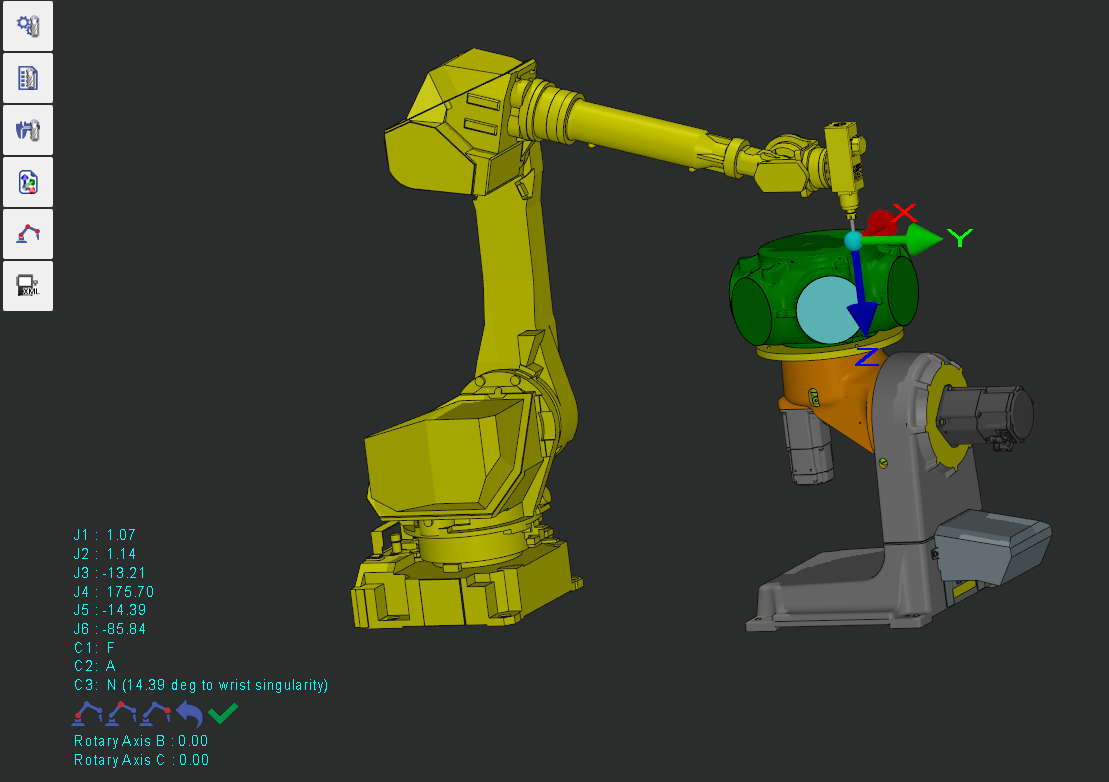
Vérification préalable de l'accessibilité
-
En outillage, double-cliquez sur n'importe quel point de la pièce → le robot se positionne automatiquement à cet endroit pour un aperçu de l'accessibilité.