S'il n'y a pas de matière significative à enlever, il est recommandé de définir le brut avec la même géométrie que la pièce. Pour ce faire, dupliquez la pièce et affectez-la comme brut.
Exécuter la simulation avec contrôle de collision activé . Plusieurs options sont disponibles pour éviter les collisions si elles se produisent:
-
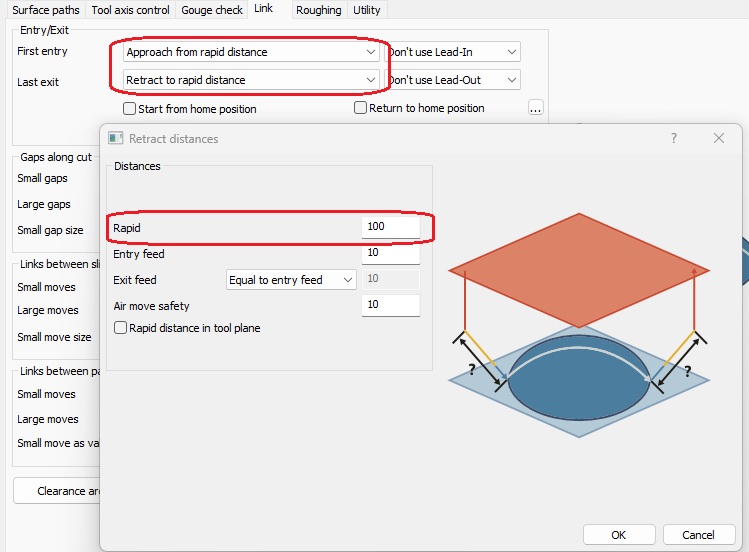
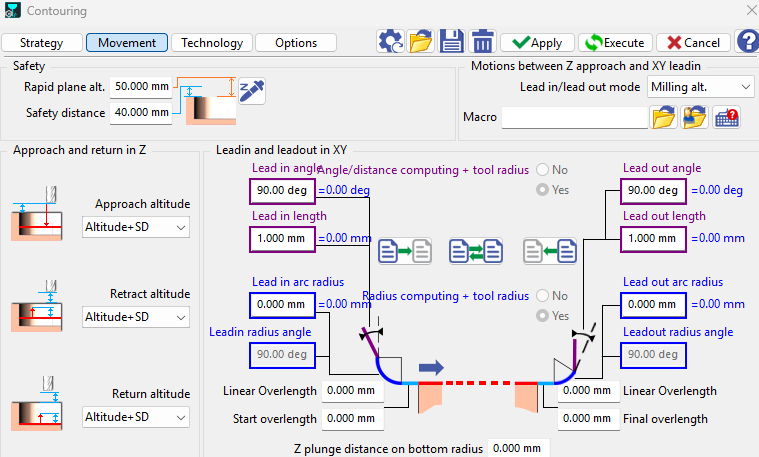
Si des collisions se produisent aux points d'approche ou de retour d'un cycle:
-
Réinitialiser les paramètres d'approche/retour (par exemple, la distance).
-
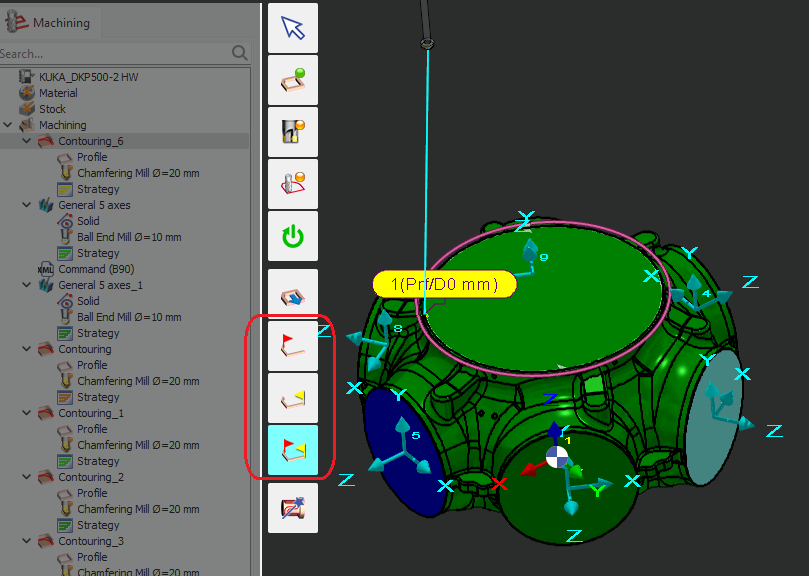
Ajouter des points d'approche/retour supplémentaires.
-
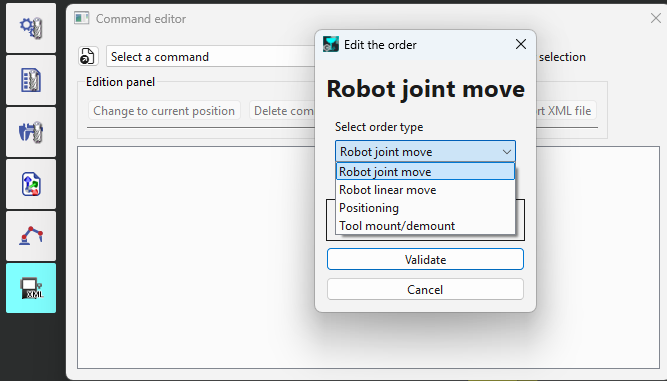
Create and insert a Commande machine move before or after the cycle.
-
Ne pas utiliser de mouvement linéaire de robot sauf si nécessaire , pour éviter le risque de singularités.
-
Recommandation: Privilégiez les méthodes a ou b , car elles modifient le cycle lui-même, qui peut ensuite être réutilisé pour d'autres robots (par exemple, dans une Opelist).
-
-
Pour rendre un axe non robot sélectionnable pour la commande machine Positionner , il doit être défini comme programmable .
Il n'est pas recommandé d'utiliser MOVE_COMPONENT dans GO2Robot. Premièrement, une seule commande MOVE_COMPONENT ne déplace qu'un seul axe; pour déplacer un robot à 6 axes, vous auriez besoin de six commandes MOVE_COMPONENT distinctes, et les mouvements ne seraient pas synchronisés. Deuxièmement, il n'est pas approprié de générer des fichiers CN pour les robots. Utilisez plutôt le Commande machine , qui peut déplacer plusieurs axes simultanément.
-
Pour les autres cas:
-
Changer la stratégie robot du cycle.
-
Modifier la position de référence du robot.
-
Repositionner le robot ou la pièce pour tester un nouveau trajet robot.
-
…
-