Um einen Werkzeugweg mit teilweise undefinierter Ausrichtung eindeutig in Roboter-Gelenkpositionen umzuwandeln, ist eine Referenzposition erforderlich. Daraus extrahieren wir:
-
Roboter-Referenzkonfiguration → wird während des gesamten Zyklus beibehalten.
-
Roboter-Referenzgelenkswinkel → die erste generierte Roboterposition wird an diese angepasst (um Gelenkdrehungen, insbesondere J4 und J6, zu bestimmen).
-
Referenz-TCP-Ausrichtung → wird verwendet, um die Werkzeugausrichtung beim Einfahren zu definieren.
Die Referenzposition kann definiert werden als:
-
Gelenkformat (roboterspezifisch) → Werkzeugausrichtung berechnet über Vorwärtskinematik.
-
Kartesisches Format mit Konfiguration (generisch und wiederverwendbar für andere Roboterarme) → Gelenkpositionen berechnet über inverse Kinematik.
Erstellen einer Roboter-Referenzposition
-
Wählen Sie das Format (Gelenk oder kartesisch).

-
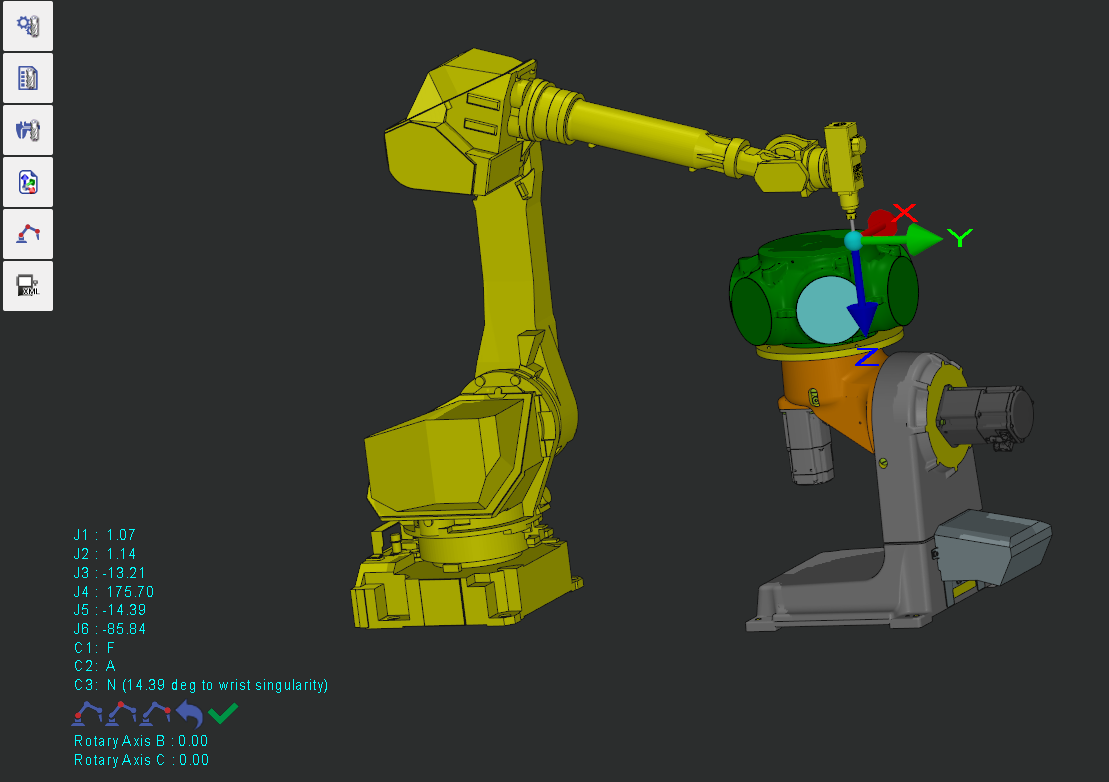
In Werkzeuge , doppelklicken Sie auf das Teil, um den Roboter zu positionieren.
-
Verwenden Sie die verfügbaren Werkzeuge, um die Konfiguration zu wechseln (Schulter–Ellbogen–Handgelenk), die Werkzeugausrichtung auszurichten, zu verschieben (durch Ziehen oder Eingabe eines Abstands) oder zu drehen (durch Ziehen oder Eingabe eines Winkels).
-
-
Benennen und speichern die Referenzposition.
-
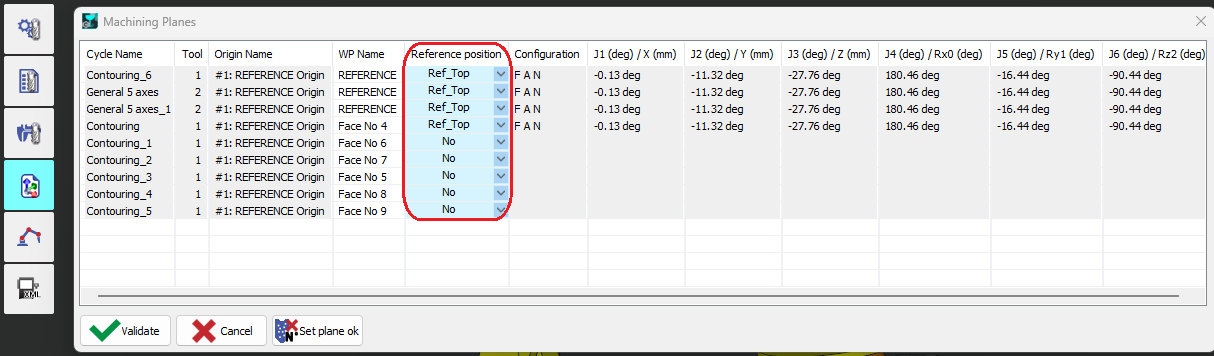
Zuweisen die erstellte Referenzposition zu Bearbeitungsvorgängen (optional).
-
Wenn keine Referenzposition zugewiesen ist, wird die aktuelle Position des Roboters vor dem Zyklus verwendet.
-