소개
이 페이지에서는 선반 기계의 척에 장착될 외부 조를 만드는 방법을 설명합니다.
|
|
|
|
공구, 심볼, 기계 등의 생성 프로세스는 대화형 축 시스템으로 더욱 유연해졌습니다.
|
|
조 생성
|
홈페이지에서 "클램핑 / 툴홀더" 모듈을 선택합니다. |

|
|
GO 버튼을 클릭하세요. |
|
|
가져올 파일을 선택하세요. |

|
|
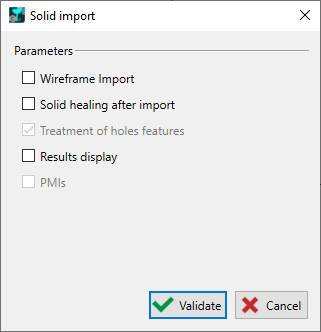
솔리드에 적용할 가져오기 옵션을 선택합니다. "적용"을 클릭하세요. |
|
|
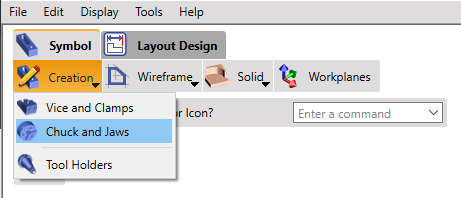
"생성" 탭을 클릭한 다음 "척 및 조" 메뉴를 클릭하세요. |
|
|
축 시스템을 생성하는 명령을 클릭하세요. |
|
|
축 시스템의 위치를 정의할 공구를 선택하세요. |

|
|
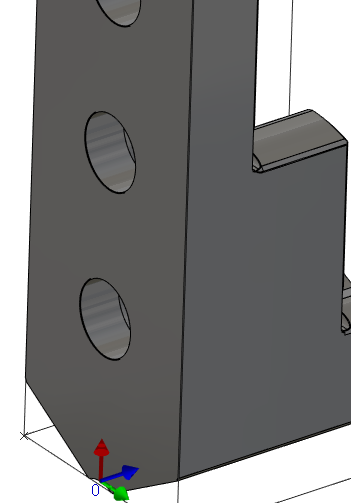
축 시스템 0을 정의합니다.
축 시스템의 원점은 척의 축 시스템 1과 일치하는 면을 정의합니다.
X 및 Z 축은 척의 축 시스템 1의 X 및 Z 축과 일치하도록 정의해야 합니다. |
|
|
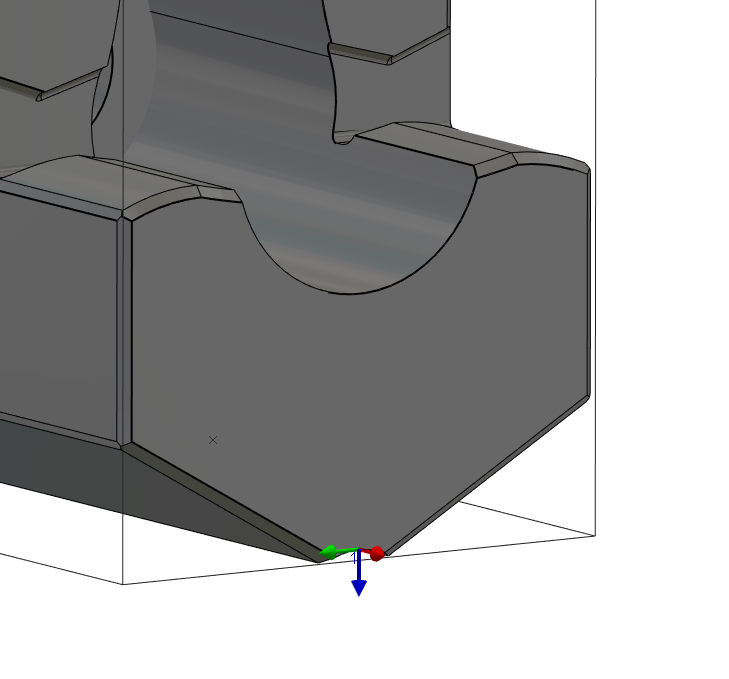
동일한 명령을 사용하여 축 시스템 1을 생성합니다. 원점 위치는 조임 위치를 정의합니다. 즉, 심 두께가 0으로 설정된 경우 소재의 뒷면이 이 위치에 있게 됩니다. Y축은 축 시스템 0의 Y축과 정렬되어야 합니다. Z축은 조임 방향을 정의합니다. 즉, 소재 방향이어야 합니다. |
|
|
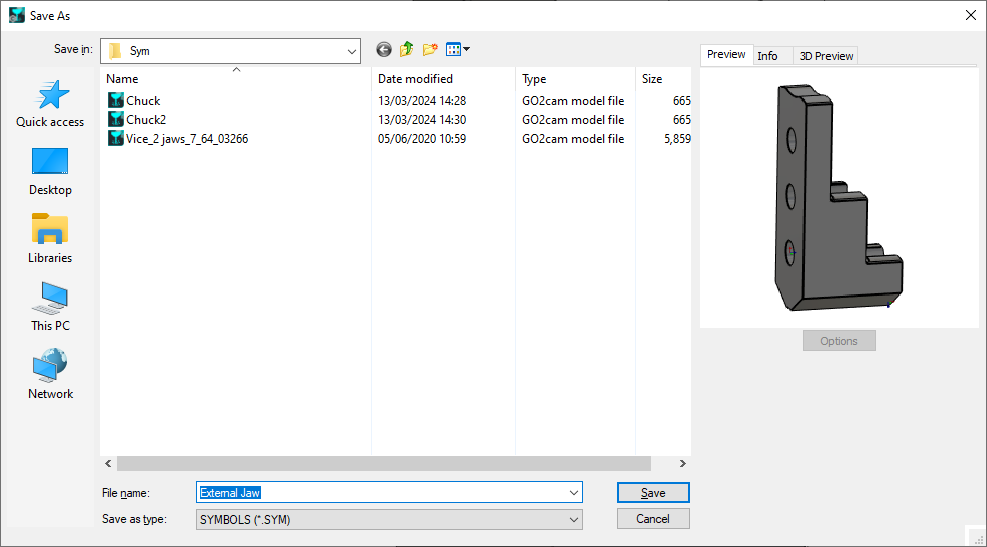
GO2cam에서 사용하기 위해 사용자의 심볼 폴더에 파일을 저장합니다. |
|
핵심 사항
-
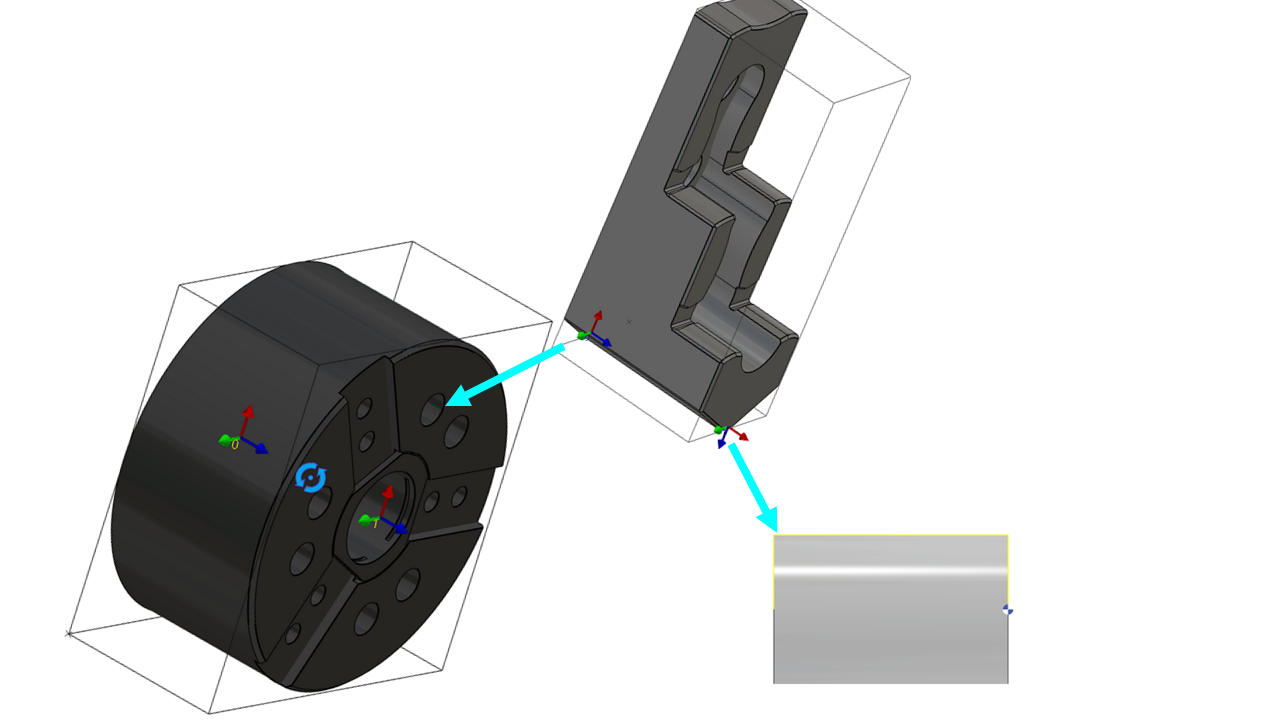
축 시스템 0의 원점은 척의 축 시스템 1에서 조의 Z 위치를 정의합니다.
-
축 시스템 0의 X 및 Z 축은 척의 축 시스템 1의 X 및 Z 축과 정렬됩니다.
-
시스템 축 1은 소재의 조임 위치를 정의합니다. Y축은 축 시스템 0의 Y축과 일치해야 합니다. Z축은 조임 방향을 나타내며, 외부 조임의 경우 축 시스템 1의 X축과 반대 방향이고 내부 조임의 경우 동일한 방향으로 정렬됩니다.
-
시스템 축의 원점은 소재의 Z 위치를 정의합니다. 심 두께가 0으로 설정된 경우 소재의 뒷면이 원점에 정렬됩니다.
여러 개의 클램핑 위치가 필요한 경우 조에 여러 개의 조임점을 정의할 수 있습니다. 이렇게 하려면 조에 추가 축 시스템을 생성합니다.
|
|