建议使用此应用程序示例的版本 晚于 6.12.209.
您可能需要更改携带的刀具/零件配置以适合您的应用。为此,请修改连接到机器人轴 6 的组件(在 主轴 → 刀具支撑 和 装配件支撑 之间切换,或反之亦然)。然后打开 机器人DH表 窗口,单击 验证 ,然后让自动校正运行。
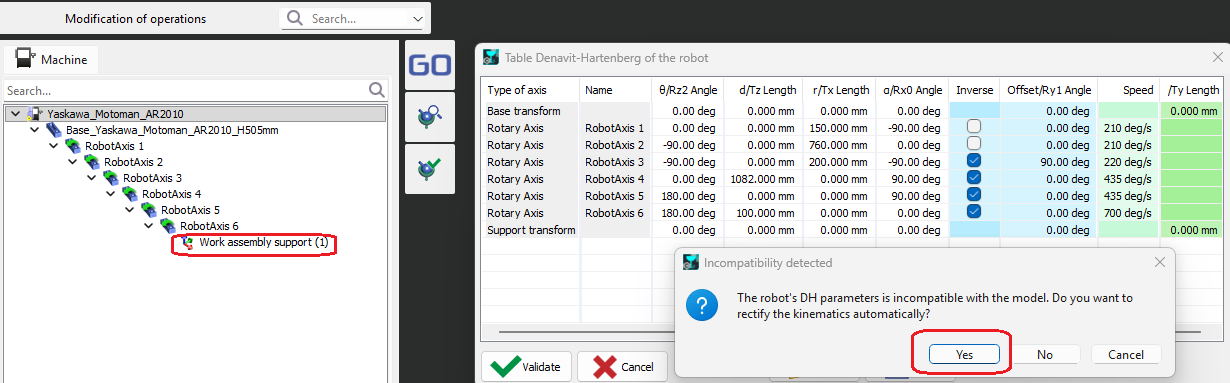
当机器人配置为零件支撑时,您可能还需要通过添加刀具支撑来完成机器人设置,或者当机器人配置为刀具支撑时,通过添加零件支撑来完成机器人设置。
用于机器人和协作机器人的 MCG
|
品牌 |
型号 |
类型 |
行程 (mm) |
携带的刀具/零件 |
链接 |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
机器人 |
901 |
携带的刀具 |
|
|
ABB |
IRB-1300-1150 |
机器人 |
1150 |
携带的刀具 |
|
|
ABB |
IRB_4600_40_2550 |
机器人 |
2550 |
携带的刀具 |
|
|
Comau |
Racer5-0_80 |
机器人 |
809 |
携带的刀具 |
|
|
Denso |
VS068 |
机器人 |
710 |
携带的刀具 |
|
|
Elite |
CS66 |
协作机器人 |
914 |
携带的零件 |
|
|
Fanuc |
ARCMate_100iD |
机器人 |
1441 |
携带的刀具 |
|
|
Fanuc |
CR-7iA_L |
机器人 |
911 |
携带的刀具 |
|
|
Fanuc |
CRX-10iAL |
协作机器人 |
1418 |
携带的刀具 |
|
|
Fanuc |
LR-Mate-200iD-7L |
机器人 |
911 |
携带的刀具 |
|
|
Fanuc |
M20iD_25 |
机器人 |
1831 |
携带的刀具 |
|
|
Fanuc |
M-710iC_70 |
机器人 |
2050 |
携带的刀具 |
|
|
Kawasaki |
RS005L |
机器人 |
903 |
携带的刀具 |
|
|
Kawasaki |
RS005N |
机器人 |
705 |
携带的刀具 |
|
|
Kuka |
KR_6_R700 |
机器人 |
726 |
携带的刀具 |
|
|
Kuka |
KR_20_R1810 |
机器人 |
1810 |
携带的刀具 |
|
|
Nachi |
MZ07L |
机器人 |
912 |
携带的刀具 |
|
|
Stäubli |
TX2-40 |
机器人 |
515 |
携带的刀具 |
|
|
Stäubli |
TX2-60 |
机器人 |
670 |
携带的刀具 |
|
|
Stäubli |
TX-90 |
机器人 |
1000 |
携带的刀具 |
|
|
Stäubli |
TX2-90L |
机器人 |
1200 |
携带的刀具 |
|
|
Stäubli |
TX2-90XL |
机器人 |
1450 |
携带的零件 |
|
|
Stäubli |
TX2-200 |
机器人 |
2000 |
携带的零件 |
|
|
STEP |
SD7-900 |
机器人 |
912 |
携带的刀具 |
|
|
Universal Robots |
UR5E |
协作机器人 |
850 |
携带的刀具 |
|
|
Yaskawa |
Motoman_AR2010 |
机器人 |
2010 |
携带的刀具 |
|
|
Yaskawa |
Motoman_GP8 |
机器人 |
727 |
携带的刀具 |
|
|
Yaskawa |
Motoman_GP225 |
机器人 |
3935 |
携带的刀具 |
|
|
Turin |
TR03-610B |
机器人 |
616 |
携带的刀具 |
位置器的 MCG
|
品牌 |
型号 |
轴 |
链接 |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|