Bu uygulama örneklerini bir sürümle çalıştırmanız önerilir 6.12.209'dan sonra.
Uygulamanıza uyacak şekilde taşınan takım/parça konfigürasyonunu değiştirmeniz gerekebilir. Bunu yapmak için, Robot Axis 6'ya bağlı bileşeni değiştirin ( Spindle → Tool Support ve Work Assembly Support arasında geçiş yapın veya tersi). Ardından DH table of robot penceresini açın, Validate öğesine tıklayın ve otomatik düzeltmenin çalışmasına izin verin.
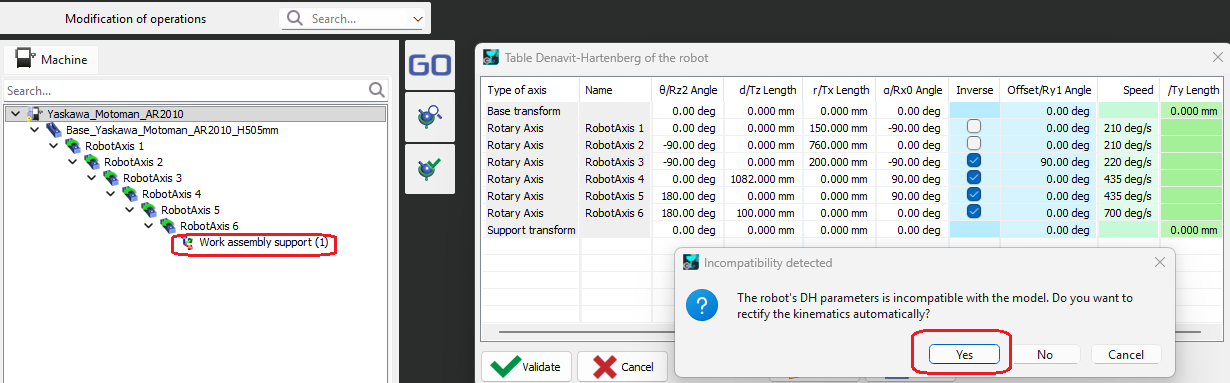
Ayrıca, robot parça desteği olarak yapılandırıldığında bir takım desteği ekleyerek veya robot takım desteği olarak yapılandırıldığında bir parça desteği ekleyerek robot kurulumunu tamamlamanız gerekebilir.
Robotlar ve cobotlar için MCG
|
Marka |
Model |
Tip |
Erişim (mm) |
Taşınan Takım/Parça |
Bağlantı |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Robot |
901 |
Takım |
|
|
ABB |
IRB-1300-1150 |
Robot |
1150 |
Takım |
|
|
ABB |
IRB_4600_40_2550 |
Robot |
2550 |
Takım |
|
|
Comau |
Racer5-0_80 |
Robot |
809 |
Takım |
|
|
Denso |
VS068 |
Robot |
710 |
Takım |
|
|
Elite |
CS66 |
Cobot |
914 |
Parça |
|
|
Fanuc |
ARCMate_100iD |
Robot |
1441 |
Takım |
|
|
Fanuc |
CR-7iA_L |
Robot |
911 |
Takım |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Takım |
|
|
Fanuc |
LR-Mate-200iD-7L |
Robot |
911 |
Takım |
|
|
Fanuc |
M20iD_25 |
Robot |
1831 |
Takım |
|
|
Fanuc |
M-710iC_70 |
Robot |
2050 |
Takım |
|
|
Kawasaki |
RS005L |
Robot |
903 |
Takım |
|
|
Kawasaki |
RS005N |
Robot |
705 |
Takım |
|
|
Kuka |
KR_6_R700 |
Robot |
726 |
Takım |
|
|
Kuka |
KR_20_R1810 |
Robot |
1810 |
Takım |
|
|
Nachi |
MZ07L |
Robot |
912 |
Takım |
|
|
Stäubli |
TX2-40 |
Robot |
515 |
Takım |
|
|
Stäubli |
TX2-60 |
Robot |
670 |
Takım |
|
|
Stäubli |
TX-90 |
Robot |
1000 |
Takım |
|
|
Stäubli |
TX2-90L |
Robot |
1200 |
Takım |
|
|
Stäubli |
TX2-90XL |
Robot |
1450 |
Parça tutuldu |
|
|
Stäubli |
TX2-200 |
Robot |
2000 |
Parça tutuldu |
|
|
Adım |
SD7-900 |
Robot |
912 |
Takım |
|
|
Robot |
UR5E |
Cobot |
850 |
Takım |
|
|
Yaskawa |
Motoman_AR2010 |
Robot |
2010 |
Takım |
|
|
Yaskawa |
Motoman_GP8 |
Robot |
727 |
Takım |
|
|
Yaskawa |
Motoman_GP225 |
Robot |
3935 |
Takım |
|
|
Turin |
TR03-610B |
Robot |
616 |
Takım |
Robot Pozisyonunun Yapılandırılması
|
Marka |
Model |
Eksenler |
Bağlantı |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|