|
|
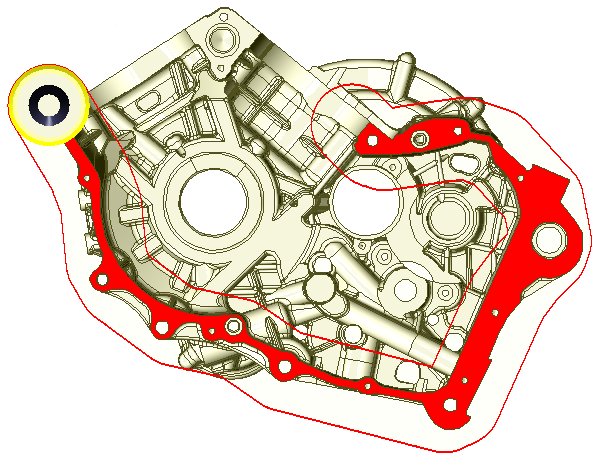
Oluşturulan takım yolu, kullanıcı tarafından manuel olarak tanımlanır. Profil açık olabilir. |
Temel Noktalar
|
Bu çevrim, geometri seçimi tamamen manuel olduğundan oldukça özeldir. Kullanıcı, takım tarafından izlenecek yolu manuel olarak tanımlar. The takım seçilmelidir ilk böylece, geometri seçimi sırasında, yolun izi görselleştirilebilir ve olası engellerden kaçınılabilir.
|
|
|

|
Strateji Parametreleri
|
Diyalog Alanı |
Parametreler |
|
|
Takım Yolu Stratejisi |
|
|
|
Z Adımlarının Hesaplanması |
|
|
|
Toleranslar |
|
|
Hareket Parametreleri
|
Diyalog Alanı |
Parametreler |
|
|
Güvenlik (Z'de) |
||
|
Z'de Yaklaşma ve Geri Dönüş |
||
|
Boşta dolaşma geri çıkış yüks |
||
|
Z yaklaşımı ve XY girişi arasındaki hareketler |
|
|
|
XY'de Giriş ve çıkış |
||
Teknoloji Parametreleri
|
Diyalog Alanı |
Parametreler |
|
|
Kesme Koşulları |
Kalite |
Kesme hızı |
|
İlerleme/diş |
F. mili Dönme yönü |
|
|
Seviye |
Devir |
|
|
İlerleme |
||
|
Devir sırası |
||
|
|
||
|
Takım Numaralandırma |
Takım no |
Özel numara |
|
Uzunluk telafi no |
Çap kompanzasyon no |
|
|
Kullanıcı Alanları |
Yorum |
Kontrol ünitesi |
|
Frezeleme Seti |
|
|

Seçenekler Parametreleri
|
Diyalog Alanı |
Parametreler |
|
|
Kelepçeler ve bileşenlerde davranış |
||
|
Güvenli alan |
||
|
Eğriler Hesaplama |
Eğri segmentasyon |
|