이러한 응용 프로그램 예제를 버전으로 실행하는 것이 좋습니다. 6.12.209보다 늦게.
응용 프로그램에 맞게 운반된 공구/부품 구성을 변경해야 할 수 있습니다. 이렇게 하려면 로봇 축 6에 부착된 구성 요소를 수정합니다( 스핀들 → 툴 서포트 와 워크 어셈블리 서포트 사이를 전환하거나 그 반대로). 그런 다음 열기 로봇의 DH 테이블 창을 클릭하고 유효성 검사 를 클릭하여 자동 수정을 실행합니다.
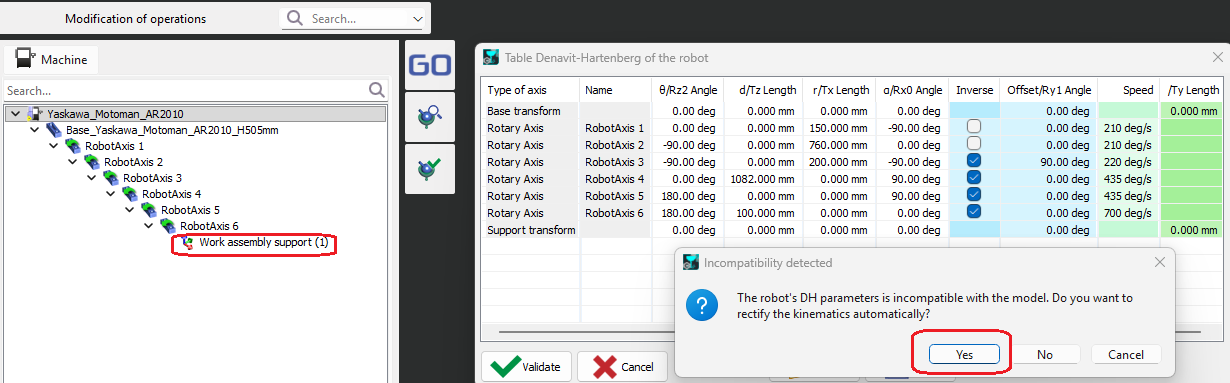
로봇이 부품 지지대로 구성된 경우 툴 서포트를 추가하거나, 로봇이 툴 서포트로 구성된 경우 부품 서포트를 추가하여 로봇 설정을 완료해야 할 수도 있습니다.
로봇 및 코봇용 MCG
|
Brand |
모델 |
형식 |
Reach (mm) |
Tool/Part carried |
링크 |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
로봇 |
901 |
공구 |
|
|
ABB |
IRB-1300-1150 |
로봇 |
1150 |
공구 |
|
|
ABB |
IRB_4600_40_2550 |
로봇 |
2550 |
공구 |
|
|
Comau |
Racer5-0_80 |
로봇 |
809 |
공구 |
|
|
Denso |
VS068 |
로봇 |
710 |
공구 |
|
|
Elite |
CS66 |
Cobot |
914 |
부품 |
|
|
Fanuc |
ARCMate_100iD |
로봇 |
1441 |
공구 |
|
|
Fanuc |
CR-7iA_L |
로봇 |
911 |
공구 |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
공구 |
|
|
Fanuc |
LR-Mate-200iD-7L |
로봇 |
911 |
공구 |
|
|
Fanuc |
M20iD_25 |
로봇 |
1831 |
공구 |
|
|
Fanuc |
M-710iC_70 |
로봇 |
2050 |
공구 |
|
|
Kawasaki |
RS005L |
로봇 |
903 |
공구 |
|
|
Kawasaki |
RS005N |
로봇 |
705 |
공구 |
|
|
Kuka |
KR_6_R700 |
로봇 |
726 |
공구 |
|
|
Kuka |
KR_20_R1810 |
로봇 |
1810 |
공구 |
|
|
Nachi |
MZ07L |
로봇 |
912 |
공구 |
|
|
Stäubli |
TX2-40 |
로봇 |
515 |
공구 |
|
|
Stäubli |
TX2-60 |
로봇 |
670 |
공구 |
|
|
Stäubli |
TX-90 |
로봇 |
1000 |
공구 |
|
|
Stäubli |
TX2-90L |
로봇 |
1200 |
공구 |
|
|
Stäubli |
TX2-90XL |
로봇 |
1450 |
부품 |
|
|
Stäubli |
TX2-200 |
로봇 |
2000 |
부품 |
|
|
패스 깊이 |
SD7-900 |
로봇 |
912 |
공구 |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
공구 |
|
|
Yaskawa |
Motoman_AR2010 |
로봇 |
2010 |
공구 |
|
|
Yaskawa |
Motoman_GP8 |
로봇 |
727 |
공구 |
|
|
Yaskawa |
Motoman_GP225 |
로봇 |
3935 |
공구 |
|
|
Turin |
TR03-610B |
로봇 |
616 |
공구 |
위치변경
|
Brand |
모델 |
축 |
링크 |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|