Si consiglia di eseguire questi esempi di applicazione con una versione successiva alla 6.12.209.
Potrebbe essere necessario modificare la configurazione dell'utensile/pezzo trasportato in base all'applicazione. Per fare ciò, modificare il componente collegato all'asse 6 del robot (passando tra Mandrino → Tool Support e Work Assembly Support , o viceversa). Quindi aprire la finestra DH table of robot , fare clic su Validate e lasciare che venga eseguita la rettifica automatica.
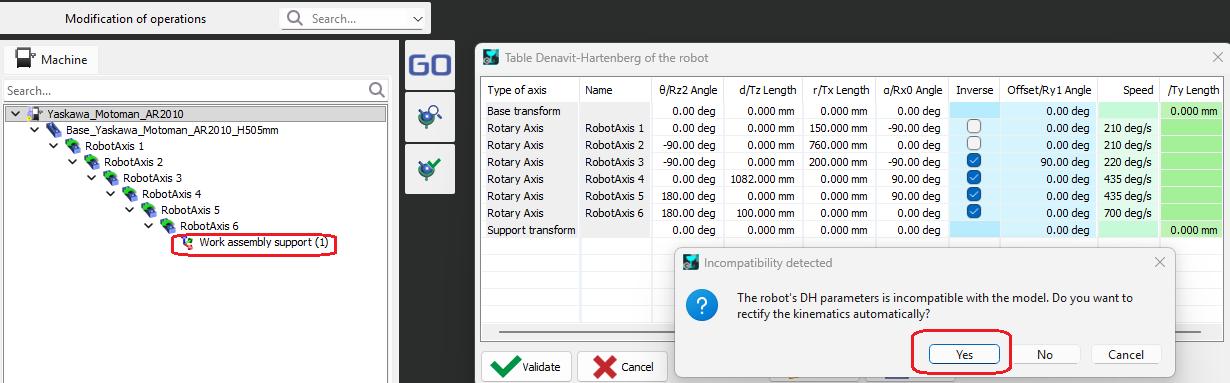
Potrebbe anche essere necessario completare l'impostazione del robot aggiungendo un supporto per utensili quando il robot è configurato come supporto per pezzi, oppure aggiungendo un supporto per pezzi quando il robot è configurato come supporto per utensili.
MCG per robot e cobot
|
Marca |
Modello |
Tipo |
Portata (mm) |
Utensile/pezzo trasportato |
Link |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Robot |
901 |
Utensile trasportato |
|
|
ABB |
IRB-1300-1150 |
Robot |
1150 |
Utensile trasportato |
|
|
ABB |
IRB_4600_40_2550 |
Robot |
2550 |
Utensile trasportato |
|
|
Comau |
Racer5-0_80 |
Robot |
809 |
Utensile trasportato |
|
|
Denso |
VS068 |
Robot |
710 |
Utensile trasportato |
|
|
Elite |
CS66 |
Cobot |
914 |
Pezzo trasportato |
|
|
Fanuc |
ARCMate_100iD |
Robot |
1441 |
Utensile trasportato |
|
|
Fanuc |
CR-7iA_L |
Robot |
911 |
Utensile trasportato |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Utensile trasportato |
|
|
Fanuc |
LR-Mate-200iD-7L |
Robot |
911 |
Utensile trasportato |
|
|
Fanuc |
M20iD_25 |
Robot |
1831 |
Utensile trasportato |
|
|
Fanuc |
M-710iC_70 |
Robot |
2050 |
Utensile trasportato |
|
|
Kawasaki |
RS005L |
Robot |
903 |
Utensile trasportato |
|
|
Kawasaki |
RS005N |
Robot |
705 |
Utensile trasportato |
|
|
Kuka |
KR_6_R700 |
Robot |
726 |
Utensile trasportato |
|
|
Kuka |
KR_20_R1810 |
Robot |
1810 |
Utensile trasportato |
|
|
Nachi |
MZ07L |
Robot |
912 |
Utensile trasportato |
|
|
Stäubli |
TX2-40 |
Robot |
515 |
Utensile trasportato |
|
|
Stäubli |
TX2-60 |
Robot |
670 |
Utensile trasportato |
|
|
Stäubli |
TX-90 |
Robot |
1000 |
Utensile trasportato |
|
|
Stäubli |
TX2-90L |
Robot |
1200 |
Utensile trasportato |
|
|
Stäubli |
TX2-90XL |
Robot |
1450 |
Pezzo tenuto |
|
|
Stäubli |
TX2-200 |
Robot |
2000 |
Pezzo tenuto |
|
|
STEP |
SD7-900 |
Robot |
912 |
Utensile trasportato |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
Utensile trasportato |
|
|
Yaskawa |
Motoman_AR2010 |
Robot |
2010 |
Utensile trasportato |
|
|
Yaskawa |
Motoman_GP8 |
Robot |
727 |
Utensile trasportato |
|
|
Yaskawa |
Motoman_GP225 |
Robot |
3935 |
Utensile trasportato |
|
|
Turin |
TR03-610B |
Robot |
616 |
Utensile trasportato |
MCG dei posizionatori
|
Marca |
Modello |
Assi |
Link |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|