Il est recommandé d'exécuter ces exemples d'application avec une version ultérieure à 6.12.209.
Vous devrez peut-être modifier la configuration de l'outil/pièce portée pour l'adapter à votre application. Pour ce faire, modifiez le composant attaché à l'axe 6 du robot (en basculant entre Broche → Support outil et Support montage , ou l'inverse). Ensuite, ouvrez la fenêtre Table DH du robot , cliquez sur Valider et laissez l'ajustement automatique s'exécuter.
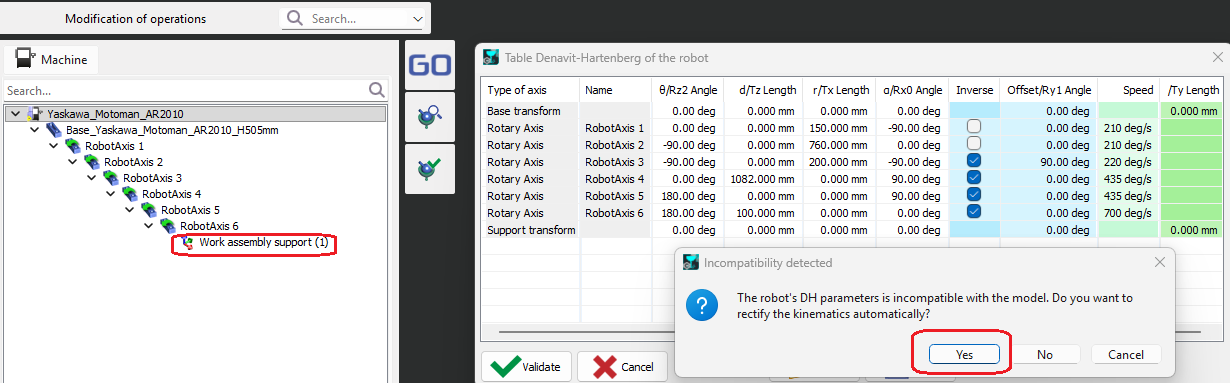
Vous devrez peut-être également compléter la configuration du robot en ajoutant un support d'outil lorsque le robot est configuré comme support de pièce, ou en ajoutant un support de pièce lorsque le robot est configuré comme support d'outil.
MCG pour robots et cobots
|
Marque |
Modèle |
Type |
Portée (mm) |
Outil/Pièce portée |
Lien |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Robot |
901 |
Outil porté |
|
|
ABB |
IRB-1300-1150 |
Robot |
1150 |
Outil porté |
|
|
ABB |
IRB_4600_40_2550 |
Robot |
2550 |
Outil porté |
|
|
Comau |
Racer5-0_80 |
Robot |
809 |
Outil porté |
|
|
Denso |
VS068 |
Robot |
710 |
Outil porté |
|
|
Elite |
CS66 |
Cobot |
914 |
Pièce portée |
|
|
Fanuc |
ARCMate_100iD |
Robot |
1441 |
Outil porté |
|
|
Fanuc |
CR-7iA_L |
Robot |
911 |
Outil porté |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Outil porté |
|
|
Fanuc |
LR-Mate-200iD-7L |
Robot |
911 |
Outil porté |
|
|
Fanuc |
M20iD_25 |
Robot |
1831 |
Outil porté |
|
|
Fanuc |
M-710iC_70 |
Robot |
2050 |
Outil porté |
|
|
Kawasaki |
RS005L |
Robot |
903 |
Outil porté |
|
|
Kawasaki |
RS005N |
Robot |
705 |
Outil porté |
|
|
Kuka |
KR_6_R700 |
Robot |
726 |
Outil porté |
|
|
Kuka |
KR_20_R1810 |
Robot |
1810 |
Outil porté |
|
|
Nachi |
MZ07L |
Robot |
912 |
Outil porté |
|
|
Stäubli |
TX2-40 |
Robot |
515 |
Outil porté |
|
|
Stäubli |
TX2-60 |
Robot |
670 |
Outil porté |
|
|
Stäubli |
TX-90 |
Robot |
1000 |
Outil porté |
|
|
Stäubli |
TX2-90L |
Robot |
1200 |
Outil porté |
|
|
Stäubli |
TX2-90XL |
Robot |
1450 |
Pièce tenue |
|
|
Stäubli |
TX2-200 |
Robot |
2000 |
Pièce tenue |
|
|
STEP |
SD7-900 |
Robot |
912 |
Outil porté |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
Outil porté |
|
|
Yaskawa |
Motoman_AR2010 |
Robot |
2010 |
Outil porté |
|
|
Yaskawa |
Motoman_GP8 |
Robot |
727 |
Outil porté |
|
|
Yaskawa |
Motoman_GP225 |
Robot |
3935 |
Outil porté |
|
|
Turin |
TR03-610B |
Robot |
616 |
Outil porté |
MCG des positionneurs
|
Marque |
Modèle |
Axes |
Lien |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|