Es wird empfohlen, diese Anwendungsbeispiele mit einer Version auszuführen, die später als 6.12.209.
Möglicherweise müssen Sie die mitgeführte Werkzeug-/Teilekonfiguration an Ihre Anwendung anpassen. Ändern Sie dazu die an Roboterachse 6 angebrachte Komponente (Umschalten zwischen Spindel → Werkzeugposition und Werkstückposition , oder umgekehrt). Öffnen Sie dann das DH Tabelle des Roboters Fenster, klicken Sie auf Bestätigen und lassen Sie die automatische Korrektur durchführen.
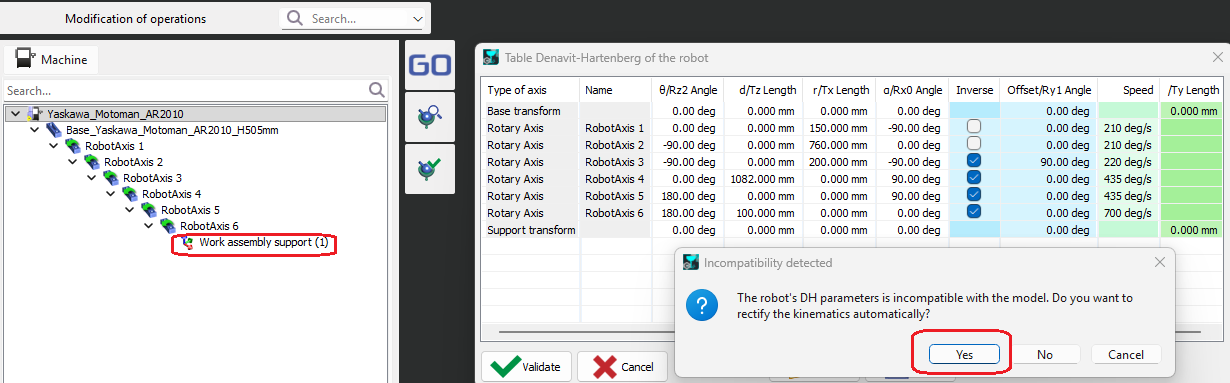
Möglicherweise müssen Sie auch die Roboter-Einrichtung abschließen, indem Sie eine Werkzeugposition hinzufügen, wenn der Roboter als Teileposition konfiguriert ist, oder indem Sie eine Teileposition hinzufügen, wenn der Roboter als Werkzeugposition konfiguriert ist.
MCG für Roboter und Cobots
|
Marke |
Modell |
Typ |
Reichweite (mm) |
Werkzeug/Teil mitgeführt |
Link |
|---|---|---|---|---|---|
|
ABB |
IRB_1200_5_900 |
Roboter |
901 |
Werkzeug mitgeführt |
|
|
ABB |
IRB-1300-1150 |
Roboter |
1150 |
Werkzeug mitgeführt |
|
|
ABB |
IRB_4600_40_2550 |
Roboter |
2550 |
Werkzeug mitgeführt |
|
|
Comau |
Racer5-0_80 |
Roboter |
809 |
Werkzeug mitgeführt |
|
|
Denso |
VS068 |
Roboter |
710 |
Werkzeug mitgeführt |
|
|
Elite |
CS66 |
Cobot |
914 |
Teil mitgeführt |
|
|
Fanuc |
ARCMate_100iD |
Roboter |
1441 |
Werkzeug mitgeführt |
|
|
Fanuc |
CR-7iA_L |
Roboter |
911 |
Werkzeug mitgeführt |
|
|
Fanuc |
CRX-10iAL |
Cobot |
1418 |
Werkzeug mitgeführt |
|
|
Fanuc |
LR-Mate-200iD-7L |
Roboter |
911 |
Werkzeug mitgeführt |
|
|
Fanuc |
M20iD_25 |
Roboter |
1831 |
Werkzeug mitgeführt |
|
|
Fanuc |
M-710iC_70 |
Roboter |
2050 |
Werkzeug mitgeführt |
|
|
Kawasaki |
RS005L |
Roboter |
903 |
Werkzeug mitgeführt |
|
|
Kawasaki |
RS005N |
Roboter |
705 |
Werkzeug mitgeführt |
|
|
Kuka |
KR_6_R700 |
Roboter |
726 |
Werkzeug mitgeführt |
|
|
Kuka |
KR_20_R1810 |
Roboter |
1810 |
Werkzeug mitgeführt |
|
|
Nachi |
MZ07L |
Roboter |
912 |
Werkzeug mitgeführt |
|
|
Stäubli |
TX2-40 |
Roboter |
515 |
Werkzeug mitgeführt |
|
|
Stäubli |
TX2-60 |
Roboter |
670 |
Werkzeug mitgeführt |
|
|
Stäubli |
TX-90 |
Roboter |
1000 |
Werkzeug mitgeführt |
|
|
Stäubli |
TX2-90L |
Roboter |
1200 |
Werkzeug mitgeführt |
|
|
Stäubli |
TX2-90XL |
Roboter |
1450 |
Teil gehalten |
|
|
Stäubli |
TX2-200 |
Roboter |
2000 |
Teil gehalten |
|
|
STEP |
SD7-900 |
Roboter |
912 |
Werkzeug mitgeführt |
|
|
Universal Robots |
UR5E |
Cobot |
850 |
Werkzeug mitgeführt |
|
|
Yaskawa |
Motoman_AR2010 |
Roboter |
2010 |
Werkzeug mitgeführt |
|
|
Yaskawa |
Motoman_GP8 |
Roboter |
727 |
Werkzeug mitgeführt |
|
|
Yaskawa |
Motoman_GP225 |
Roboter |
3935 |
Werkzeug mitgeführt |
|
|
Turin |
TR03-610B |
Roboter |
616 |
Werkzeug mitgeführt |
MCG von Positionierern
|
Marke |
Modell |
Achsen |
Link |
|---|---|---|---|
|
ABB |
IRBP_L300_L1250 |
1 |
|
|
KUKA |
DKP500 |
2 |
|