사이클 : millyuGO pocket, Facing Pocket, Pocket, Pocket+Contour, Pocket rework, millyuGO, PAM, Roughing/Reworking, Facing Roughing, Pocket - Shape, Flat Face Finish, Finish Contour - Shape
플런지
정의
안전과 효율성은 자동 플런지 동작으로 보장됩니다.
필요한 선택이 불가능한 경우(예: 헬릭스에 플런지할 공간이 부족한 경우), GO2cam은 자동으로 다음 옵션을 적용합니다(램핑 등).
몇 가지 옵션이 가능합니다:
|
|
헬릭스 |
|
|
램핑 반전 |
|
|
수직 |
|
|
지그재그 |
|
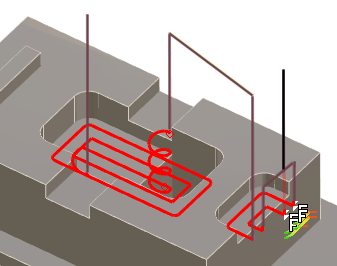
열린 포켓의 경우, 첫 번째 플런지(검정색)는 항상 재료 외부 입니다. 그런 다음 두 번째 포켓은 헬릭스 플런지로 수행됩니다. |
동일한 사이클에서 GO2cam은 1 st 선택(헬릭스)을 첫 번째 플런지(검정색) 동안 적용한 다음, 헬릭스에 충분한 공간이 없으면 2 nd 선택(램핑)으로 변경합니다. . |
|
|
미니 헬릭스 반경
정의
|
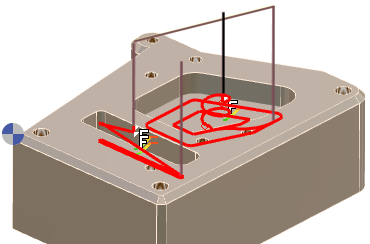
플런지를 위한 최소 헬릭스 반경의 정의는 이 값이 공구 반경 값보다 클 수 없다는 것입니다. 공구는 정의된 반경과 가공 영역에 따라 가능한 곳에서 헬릭스로 플런지합니다. 예시와 같이 불가능한 경우 공구는 램핑 플런지를 수행합니다. |
|
미니 램핑 반경
램핑 플런지를 위한 최소 반경(최대 = 공구 반경).
미니 래드 머신 영역
최소 가공 영역의 반경(공구 반경보다 작으면 쓸모없음).
플런지 각도
0.0과 같은 각도는 공구의 플런지 각도와 같거나 플런지를 정의하는 값을 입력합니다.