사이클: TurnyuGO, 드릴링 리밍, 챔퍼링, 점에서 점
정의
이 명령어는 파일럿 포인트와 공구경로 계산을 정의하는 데 사용됩니다.
공구경로
공구경로는
GO2cam
에 의해 계산되며 공구 반경을 고려하거나 고려하지 않습니다.
풀다운 메뉴는 다음을 제공합니다.

|
공구 중심: GO2cam은 사이클 유형(위 참조)에 따라 오른쪽에 공구 오프셋 공구경로를 계산합니다. 반경은 GO2cam TOOL 패널에 정확하게 완성됩니다. |

|
가상 노즈: GO2cam은 공구경로를 계산하고 충돌을 관리합니다. 반경은 GO2cam TOOL 패널에 정확하게 완성됩니다. 사분면 번호가 고려됩니다. |
공구 중심 프로그래밍
이 경우 기계에서 완료된 인서트 반경은 고려되지 않습니다.
옵셋 유형:
중심
공구경로:
공구
GO2cam
프로그램된 사이클 유형에 따라 파트의 오른쪽에 인서트 중심 공구경로를 프로그래밍합니다.
옵셋 유형 = 왼쪽 또는 오른쪽을 완료하면 GO2cam은 G41 또는 G42 보정을 프로그래밍합니다. 인서트 반경 보정이 고려되므로 기계에 의해 추가 옵셋이 생성됩니다.
가상 노즈 프로그래밍
이 경우 기계에서 완료된 인서트 반경은 고려되지 않습니다.
사분면 번호를 완료해야 합니다.
옵셋 유형:
중심
공구경로:
가상 노즈
GO2cam
가상 노즈(가상 지점) 공구경로는 프로그래밍된 사이클 형식과 할당된 사분면 번호에 따라 부품의 오른쪽에 프로그래밍됩니다.
옵셋 형식 = 왼쪽 또는 오른쪽을 완료하면 GO2cam은 G41 또는 G42 보정을 프로그래밍합니다. 인서트 반경 보정이 고려되므로 머신에 의해 추가 옵셋이 생성됩니다.
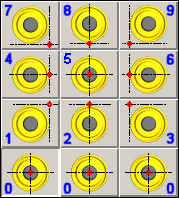
사분면
공구 방향을 제공합니다.
가상 노즈
공구경로를 사용할 때만 유용합니다.
숫자는 PC 키보드의 위치에 해당합니다. 선반의 사분면 번호는
GO2cam
의 번호와 반드시 일치하지 않습니다. 후처리기는 CNC 규칙으로 사분면을 업데이트합니다.