사이클: 직선 그루빙, Z 레벨, 지그재그, W 타입, O 링 타입, 피니시 그루브
공구경로
정의
이 명령어는 공구경로 계산에 사용됩니다.
공구 경로는 GO2cam에 의해 계산되며 공구 반경을 고려하거나 고려하지 않습니다.
풀다운 메뉴는 다음을 제공합니다.
|
|
다음에만 적용 가능 피니시 그루브 사이클 |

|
|

|
|
|
|
이 옵션을 사용하면 동일한 공구로 거친 가공 및 정삭 작업을 올바르게 프로그래밍할 수 있습니다. ( 거친 가공 가상 노즈에서 공구경로 ) , 정삭 부품 에서). 이러한 상황에서는 동일한 공구에 대해 2개의 서로 다른 파일럿 포인트를 갖지 않도록 공구 페이지에서 직접 P Point 옵션을 강제하는 것이 좋습니다. 다음에만 적용 가능 피니시 그루브 사이클 |
공구는 전면에 절삭면이 표시됩니다.
파일럿 포인트
정의
이 명령을 사용하면 커터 보정 유형을 선택할 수 있습니다.
풀다운 메뉴는 다음을 제공합니다.
-
1점만
-
2점 자동
-
2점 강제
1점만
1개의 커터 보정이 사용됩니다.
|
파일럿 유형 |
왼쪽 |
중심 |
오른쪽 |
중심 P |
||||
|
가상 점 / 공구 중심 |

|

|

|

|

|

|

|

|
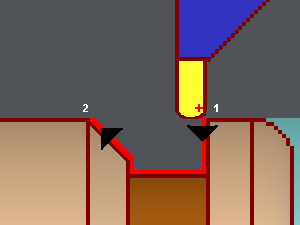
2점 자동
프로파일의 방향에 따라 2개의 커터 보정이 사용됩니다.
|
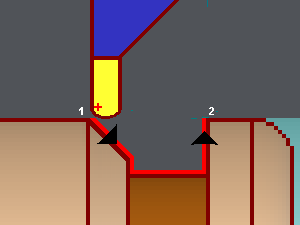
프로파일이 오른쪽에서 시작되므로 오른쪽 점이 파일럿됩니다. |
프로파일이 왼쪽에서 시작되므로 왼쪽 점이 파일럿됩니다. |
|
|
2점 강제
2개의 커터 보정이 사용되지만 첫 번째 파일럿 포인트를 선택할 수 있습니다.
|
파일럿 유형 |
왼쪽 |
중심 |
오른쪽 |
중심 P |
||||
|
가상 점 / 공구 중심 |

|

|

|

|

|

|
|

|
파일럿 유형
정의
이 명령은 공구 경로의 파일럿 포인트를 정의하는 데 사용됩니다.
선택한 파일럿 포인트 수에 따라 다릅니다.
-
왼쪽 : 보정은 공구의 왼쪽에서 고려됩니다( '왼쪽' on the above tables).
-
중심 ): 보정은 공구의 중앙에서 고려됩니다( '중앙' on the above tables).
-
오른쪽 ): 보정은 공구의 오른쪽에서 고려됩니다( '오른쪽' on the above tables).