이 옵션은 여러 가공 사이클에서 서로 다른 목적과 동작으로 사용됩니다.
화면 오른쪽에 있는 트리 을 사용하십시오.
Cycle: 황삭, // 황삭, 밸런스 황삭, 황삭 패스, 정삭 / 피니싱 Ø / 페이스, 밸런스 피니싱
정의
이 명령어는 파일럿 포인트와 공구 경로 계산을 정의하는 데 사용됩니다.
옵셋 유형 거칠기 가공, // 거칠기 가공, 거칠기 가공 패스, 피니싱
공구 반경 보정을 고려할지 여부를 지정할 수 있습니다.
풀다운 메뉴는 다음을 제공합니다.
-
왼쪽: ISO 코드는 명령 G41을 생성합니다.
-
중앙: ISO 코드는 명령 G40(보정 없음)을 생성합니다.
-
오른쪽: ISO 코드는 명령어 G42를 생성합니다.
이 옵셋 유형은 마무리 Ø / 면 전용으로 사용할 수 있습니다.
마무리 Ø / 면에 대한 옵셋 유형
공구 반경 보정을 고려할지 여부를 활성화합니다.
풀다운 메뉴는 다음을 제공합니다.
-
사용: 선택한 공구경로의 유형에 따라 ISO 코드는 명령어 G41 또는 G42를 생성합니다.
-
사용 안 함: 보정이 프로그래밍되지 않습니다.
공구경로
공구경로는 GO2cam에 의해 계산됩니다. 그리고 공구 반경을 고려하거나 고려하지 않습니다. 풀다운 메뉴는 다음을 제공합니다:

|
파트(공구 중심): GO2cam은 오프셋 공구경로를 계산하지 않습니다. ISO 프로그래밍은 기하학적 윤곽을 따릅니다. 공구가 통과하지 않는 경우 GO2cam은 새로운 적절한 경로를 재계산하고 충돌을 관리합니다. |

|
공구 중심:
GO2cam은 사이클 유형(위 참조)에 따라 오른쪽에 공구 오프셋 공구경로를 계산합니다.
|

|
가상 노즈: GO2cam은 공구경로를 계산하고 충돌을 관리합니다. 반경은 GO2cam TOOL 패널에서 올바르게 완료됩니다. 사분면 번호가 고려됩니다. |

|
파트(가상 노즈): GO2cam은 사이클 간 및 급속 동작에서 특히 공구 보정을 사용하여 공구경로를 올바르게 관리합니다. |
파트(공구 중심) 프로그래밍
이 경우 인서트 반경 값을 기계에 입력해야 합니다.
옵셋 유형:
왼쪽(G41 지정)
오른쪽(G42 지정)
툴패스:
파트(툴 중심)

A.
프로그램된 툴패스
B.
인서트 반경 보상이 CNC에 포함됨.
툴 중심 프로그래밍
이 경우, 기계에서 완성된 인서트 반경은 고려되지 않습니다.
옵셋 형식:
중심
툴패스:
공구 중심
GO2cam에 의해 계산됩니다.
프로그램된 사이클 유형에 따라 파트의 오른쪽에 인서트 중심 공구경로를 프로그래밍합니다.
완료하면 옵셋 유형 = 왼쪽 또는 오른쪽 , GO2cam에 의해 계산됩니다. G41 또는 G42 보상을 프로그래밍합니다. 인서트 반경 보상이 고려되므로 머신에 의해 추가적인 옵셋이 생성됩니다.
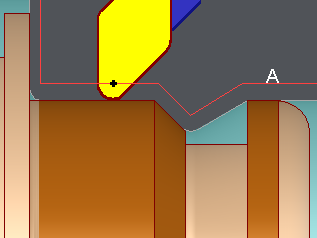
A. 프로그램된 툴패스
가상 노즈 프로그래밍
이 경우, 기계에서 완성된 인서트 반경은 고려되지 않습니다.
사분면 번호를 완료해야 합니다.
옵셋 형식:
사용할 수 없음
툴패스:
가상 노즈
GO2cam에 의해 계산됩니다.
프로그램된 사이클 유형과 할당된 사분면 번호에 따라 파트의 오른쪽에 가상 노즈(가상 지점) 공구경로를 프로그래밍합니다.
완료하면 옵셋 유형 = 왼쪽 또는 오른쪽 , GO2cam에 의해 계산됩니다. G41 또는 G42 보상을 프로그래밍합니다. 인서트 반경 보상이 고려되므로 머신에 의해 추가적인 옵셋이 생성됩니다.
|
|
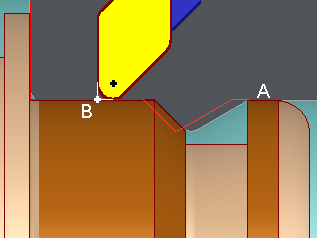
A.
프로그램된 툴패스
B.
가상 코 (즉, 사분면의 9번)
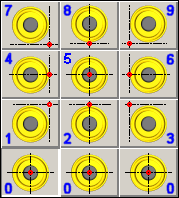
사분면(가상 코 번호)
공구 방향을 제공합니다. 사용할 때만 유용합니다.
가상 노즈
공구경로.
숫자는 PC 키보드의 위치에 해당합니다. 선반 사분면 번호는 반드시 해당하지 않습니다.
GO2cam에 의해 계산됩니다.
포스트 프로세서는 CNC 규칙에 따라 사분면을 업데이트합니다.
파트 (가상 노즈)
이 옵션을 사용하면 사이클 간 및 다음에 대한 급속 동작의 공구 경로를 관리할 수 있습니다.
-
거칠기 그리고 정삭 프로그래밍된 운용 같은 공구로 .
-
거친 공구 경로 상상의 코, 마무리 중 파트
|
또한 P Point 옵션을 직접 강제로 적용하는 것이 좋습니다. 공구 페이지 따라서 동일한 공구에 대해 2개의 서로 다른 파일럿 포인트를 가질 수 없습니다.

|
|
P point Calculation
P Point 계산 프로세스가 공구경로 효율 및 정확도 향상을 위해 크게 개선되었습니다. 주요 개선 사항으로는 업데이트된 동적 및 공구경로 시뮬레이션, 명시적인 P Point 좌표, 패러사이트 동작 제거, 최적화된 급속 동작, 향상된 밸런스 황삭 및 정삭, 접근/복귀점의 선택적 포함, 그리고 개선된 게이지 체크가 포함됩니다. 이러한 발전은 보다 효율적이고, 정확하며, 안정적인 공구경로를 생성합니다.