|
|
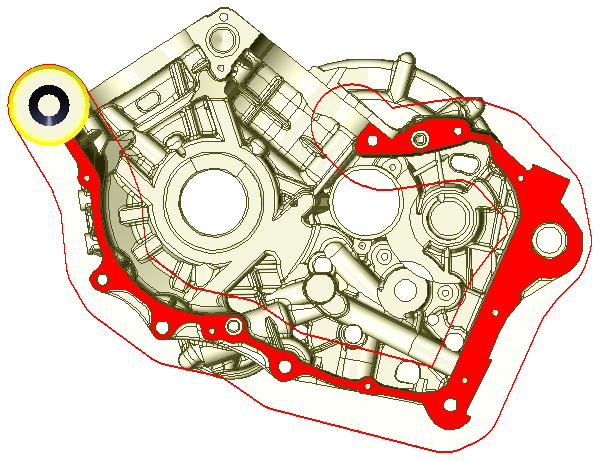
생성된 공구 경로는 사용자가 수동으로 정의합니다. 프로파일은 열 수 있습니다. |
주요 포인트
|
이 사이클은 형상 선택이 완전히 수동이므로 매우 구체적입니다. 사용자는 공구가 따라야 할 경로를 수동으로 정의합니다. The 공구 선택해야 합니다 먼저 따라서 형상 선택 중에 경로의 추적을 시각화하고 잠재적인 장애물을 피할 수 있습니다.
|
|
|

|
전략 매개변수
|
대화 상자 영역 |
매개변수 |
|
|
공구 경로 전략 |
|
|
|
Z 단계 계산 |
|
|
|
허용량 |
|
|
이동 매개변수
|
대화 상자 영역 |
매개변수 |
|
|
안전 (Z) |
||
|
Z 접근 및 복귀 |
||
|
급속 복귀점 고도 |
||
|
Z 접근과 XY 리드인 사이의 동작 |
|
|
|
XY 리드인 및 리드아웃 |
||
테크놀러지 파라미터
|
대화 상자 영역 |
매개변수 |
|
|
가공 조건 |
품질 |
가공 속도 |
|
피이드레이트/잇수 |
스핀들 방향 |
|
|
레벨 |
스핀들 속도 |
|
|
피이드레이트 |
||
|
스핀들 속도 범위 |
||
|
|
||
|
공구 번호 매기기 |
공구 번호 |
특정 번호 |
|
길이 보정 번호 |
직경 보정 번호 |
|
|
사용자 필드 |
Comment |
제어 장치 |
|
밀링 세트 |
|
|
