Why Robots?
|
ロボット技術の進歩、生産品質の向上、機械効率の向上、産業の高度化により、世界のCAM市場は急速に成長しています。ロボットは24時間365日稼働し、50ミクロン以下の高精度で優れた再現性を提供し、時間とともに高い投資収益率(ROI)を実現します。Industry 4.0、機械学習、AIの進歩に不可欠であり、様々な業界でイノベーションを推進し、生産性を向上させています。 |
|
Robot Offline Programming (OLP)従来、ロボットはティーチペンダント(手持ち型デバイス)を使用して教え込まれ、手動でタスクを実行します。この方法は面倒で、危険で、時間がかかります。オフラインロボットプログラミング(OLP)を使用すると、オペレーターはデジタル3Dモデルを使用してリモートで作業し、ロボットパスを生成して検証してからロボットにアップロードできます。これにより、手動によるティーチングが削減され、安全性が向上し、効率が向上します。 ROPの利点:
|

|
Technical Features of GO2cam Robot
|
GO2CAMは、ロボットキネマティクス計算のための強力な数学エンジンを備えたOLPを実装するためのインフラストラクチャをすべて備えています。 GO2CAMの目的は、ロボットプログラミングの困難さの多くをソフトウェア内に保持し、顧客にとってロボットをフライス盤と同じくらい簡単に使用できるようにすることです。 GO2camのROPは次のような場合に適用できます。 |
||
|
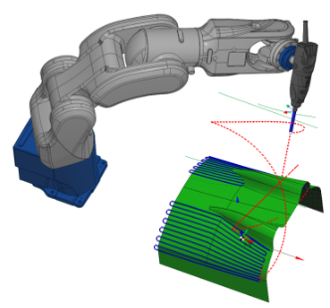
> ロボットが連続パスに従うことが期待されるタスクの場合、ワークフローは工作機械とほぼ同じです
|
|
|
|
> ロボットが複数のウェイポイントを通過するだけでよいタスクの場合、インタラクティブインターフェースを使用してパス全体を計画します
|

|
|
|
ソフトウェアは、ほぼすべてのシリアル6軸ロボットを処理できます。 |
|
|
|
タイプ1: 最後の3つの軸が1点で交わるほとんどすべての産業用6軸ロボット 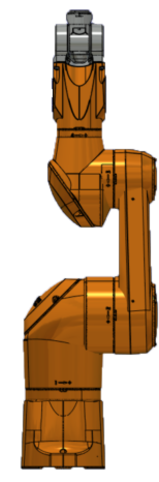
|
タイプ2: 2番目、3番目、4番目の軸が平行であるほとんどの協働ロボット 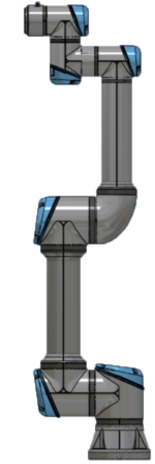
|
タイプ3: タイプ1に似ていますが、最後の3つの軸が1点で交わらない(Fanuc CRX) 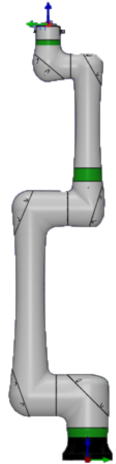
|
GO2camでロボットをプログラムする手順は、主に次のとおりです。
-
他のロボットセルにも再利用できるパーツのCAM。
-
他のパーツにも再利用できるロボットセルの設計。
-
ロボット加工戦略の設定
-
シミュレーションと衝突検出
-
PPとテクノ機能の設定
-
ロボットプログラムの生成