Bu seçenek, farklı amaçlar ve davranışlarla çeşitli işleme çevrimlerinde kullanılır.
Lütfen ekranın sağ tarafındaki ağaç kullanın.
Cycle: Kaba, // Kaba, Dengeli kaba, Kaba geçiş, Son işlem / Ø / Yüz bitirme, Dengeli Bitirme
Tanım
Bu komutlar, pilot noktalarını ve takım yolunun hesaplanmasını tanımlamak için kullanılır.
Ofset tipi Kaba işleme, // Kaba işleme, Kaba işleme geçişi, Bitirme
Takım yarıçapı telafisinin hesaba katılmasına veya katılmamasına izin verir.
Açılır menü şunları sunar:
-
Sol: ISO kodu G41 komutunu üretir.
-
Merkez: ISO kodu G40 komutunu üretir (telafi yok).
-
Sağ: ISO kodu G42 komutunu oluşturur.
Bu Ofset Tipi yalnızca Sonlandırma Ø / Yüz için kullanılabilir.
Sonlandırma Ø / Yüz için ofset tipi
Takım yarıçapı telafisinin hesaba katılmasını veya katılmamasını sağlar.
Açılır menü şunları sunar:
-
İle: ISO kodu, seçilen takım yolu türüne göre G41 veya G42 komutunu üretir.
-
Kompanzasyon yok: hiçbir kompanzasyon programlanmamıştır.
Toolpath
Takım yolu şu şekilde hesaplanır GO2cam ve takım yarıçapını hesaba katıp katmamayı belirler. Açılır menü şunları sunar:

|
Parça (Alet merkezi): GO2cam ofset takım yolunu hesaplamaz. ISO programlama geometrik konturu takip eder. Takımın geçmediği durumlarda GO2cam yeni uygun bir yol yeniden hesaplar ve çarpışmayı yönetir. |

|
Alet Merkezi:
GO2cam, Döngü Tipine (yukarıya bakınız) göre takım ofset takım yolunu sağ tarafta hesaplar.
|

|
Hayali Burun: GO2cam takım yolunu hesaplar ve çarpışmaları yönetir. Yarıçap GO2cam TAKIM panelinde doğru bir şekilde tamamlanır. Dörtlü sayısı dikkate alınır. |

|
Parça (Hayali Burun): GO2cam, çevrim içi döngüler ve hızlı hareketlerde ve özellikle takım telafisi ile takım yolunu doğru bir şekilde yönetir. |
Part (Tool Center) programming
Bu durumda, makineye uç yarıçapı değerini girmeliyiz.
Ofset Tipi:
Sol (G41 verir)
Sağ (G42 verir)
Alet yolu:
Parça (Alet merkezi)
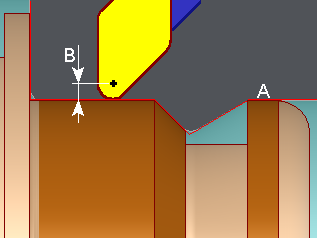
A.
Programlanmış takım yolu
B.
CNC'de radyüs ekleme telafisi dahildir.
Programming length
Bu durumda, makinede tamamlanan uç yarıçapı dikkate alınmaz.
Ofset Tipi:
Merkez
Alet yolu:
Alet merkezi
GO2cam
programlanan Döngü Tipine göre parçanın sağ tarafına uç merkez takım yolunu programlamaktadır.
Profili tamamla Ofset Tipi = Sol veya Sağ , GO2cam G41 veya G42 telafisini programlar. Etki, uç yarıçapı telafisinin dikkate alınması nedeniyle makine tarafından ek bir ofset oluşturulmasıdır.
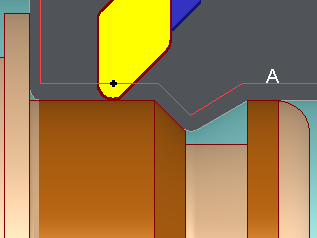
A. Programlanmış takım yolu
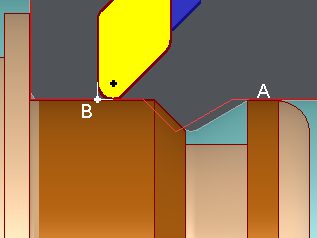
Imaginary Nose programming
Bu durumda, makinede tamamlanan uç yarıçapı dikkate alınmaz.
The quadrant number must be completed.
Ofset Tipi:
Mevcut değil
Alet yolu:
Hayali Burun
GO2cam
programlanan Döngü Tipine ve atanmış kadran numarasına göre parçanın sağ tarafında Hayali Burun (kurgusal nokta) takım yolunu programlamaktadır.
Profili tamamla Ofset Tipi = Sol veya Sağ , GO2cam G41 veya G42 telafisini programlamaktadır. Etki, uç yarıçapı telafisi dikkate alındığından makinenin ek bir ofset oluşturmasıdır.
|
|
A.
Programlanmış takım yolu
B.
Hayali Burun (yani dörtte birinde 9 numara)
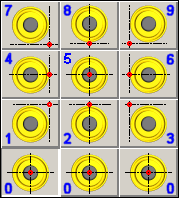
Dörtgen (Hayali Burun No.)
Takım yönlendirmesini verir. Yalnızca kullanılırken kullanışlıdır
Hayali Burun
Takım yolu
Sayılar, PC klavyesindeki konumlara karşılık gelir. Torna tezgahlarının dörtgen numaraları, kaçınılmaz olarak bunlara karşılık gelmez.
GO2cam
Post-işlemciler, CNC'nin kuralına göre kadranı günceller.
(Hayali burun)
Bu seçenekle, döngüler arası ve hızlı hareketler için takım yollarını yönetebilirsiniz:
-
Kaba işleme ve Z Seviyeli İşleme Programlanmış işlemler aynı takımla .
-
Kaba takım yolu içinde Hayali Burun, Bitiş aşamasında Parça
|
Ayrıca P Noktası seçeneğini doğrudan zorlamanızı tavsiye ederiz Takım sayfası , böylece aynı takım için 2 farklı pilot noktası bulunduramazsınız.

|
|
P point Calculation
P Noktası hesaplama işlemi, takım yolu verimliliğini ve doğruluğunu artırmak için önemli ölçüde geliştirilmiştir. Ana geliştirmeler arasında güncellenmiş dinamik ve takım yolu simülasyonları, açık P Noktası koordinatları, parazit hareketlerinin ortadan kaldırılması, optimize edilmiş hızlı hareketler, geliştirilmiş dengeli kaba ve bitirme işlemleri, yaklaşma/geri dönüş noktalarının isteğe bağlı eklenmesi ve geliştirilmiş bir ölçü kontrolü yer almaktadır. Bu gelişmeler, daha verimli, doğru ve güvenilir takım yolları ile sonuçlanır.